
Увеличить дальность радиоуправления игрушки
Обновлено: 04.05.2024
Система радиоуправления позволяет дистанционно управлять игрушкой на расстоянии до 10 метров.
Рабочая частота передатчика 27,12 мГц.
Мощность передатчика в пределах 4-10 мВт.
Потребление тока передатчиком не более 20 мА.
Вес передатчика с антенной и питанием не более 150 г.
Чувствительность приемника в рабочей полосе частот не хуже 100 мкВ.
Потребление тока приемником не более 20 мА.
Вес приемника не более 70 г.
Командоаппарат обеспечивает выполнение четырех различных команд, которые повторяются периодически.
Вес командоаппарата не более 70 г.
Питание приемника и передатчика производится от батарей "Крона-ВЦ".
Принцип работы
Передатчик состоит из модулятора и генератора высокой частоты (рис.1). Модулятором передатчика служит симметричный мультивибратор, собранный на низкочастотных транзисторах VT2 и VT3 типа МП40.
Генератор высокой частоты собран на транзисторе VT1 типа П416 по схеме с емкостной обратной связью. При открытом транзисторе модулятора VT2 цепь генератора замыкается на плюс батареи, генератор возбуждается на рабочей частоте, сигнал высокой частоты излучается антенной.
Приемник состоит из высокочастотного каскада, усилителя низкой частоты и электронного реле.
Высокочастотный каскад приемника представляет собой сверхрегенератор. Сверхрегенератор собран на высокочастотном транзисторе VT1 типа П416 (рис.2).
При отсутствии сигнала на эмиттерной цепочке С5 R3 наблюдаются колебания частоты гашения. Частота гашения определяет чувствительность сверхрегенератора на его рабочей частоте и подбирается элементами С5, R3.
Командный сигнал передатчика выделяется контуром L1-С4, усиливается и детектируется сверхрегенератором. Фильтр R4-С8 пропускает сигнал команды низкой частоты на вход усилителя VT2, отделяя при этом частоту гашения более высокого порядка.
Электронное реле собрано на транзисторах VT3-VT4 типа МП40, п коллектор транзистора VT4 включено исполнительное реле КР типа РСМ-1.
Напряжение низкой частоты командного сигнала усиливается транзисторами VT3-VT4 и подается через конденсатор С13 на вы-прямительную ячейку УД1, УДЗ.
Выпрямленное напряжение через резистор R9 поступает на базу транзистора VT3. При этом эмиттерный ток транзистора VT3 резко увеличивается, транзистор VT4 открывается. Реле срабатывает, замыкая цепь питания двигателя командоаппарата.
Командоаппарат состоит из электродвигателя, храпового механизма, программного диска и распределительных скользящих контактов. Программный диск, боковая сторона которого представляет собой систему перемычек, коммутирует через распределительные скользящие контакты питание двигателей привода и других электрических элементов игрушки.
Описание электрической схемы радиоуправляемой игрушки
На схеме (рис.3) показан один из вариантов электрооборудования радиоуправляемой игрушки.
В игрушке имеются два приводных двигателя, которые обеспечивают движение вперед и повороты налево и направо. Лампочки задних фонарей игрушки служат сигналами поворота. Две фары создают эффект освещения пути движения игрушки.
Для приема сигналов команды от передатчика в игрушку вмонтированы приемник и Командоаппарат. Двигатель привода и командоаппарата, а также лампочки питаются от двух последовательно соединенных батарей типа 3336Л(У) (GB1). Для питания приемника служит батарея "Крона-ВЦ" (GB2). Для выключения батареи служит двухполюсный выключатель S. При поступлении сигнала команды от передатчика срабатывает реле КР, приемника и своими контактами включает электродвигатель командоаппарата (рис.4)МЗ.
Электродвигатель МЗ с помощью храпового механизма поворачивает программный диск на 30°, что соответствует переключению одной команды.
Программный диск через распределительные скользящие контакты включает электродвигатели привода и лампочки игрушки следующим образом:
В положении "вперед" замкнуты контакты 1, 2, 3, 4, при этом включены двигатели М1 и М2, а также лампочки Н1, Н2, НЗ, Н4.
В положении "направо" замкнуты контакты 1, 2, при этом включены двигатель М1 и лампочка НЗ.
В положении "стоп" все контакты разомкнуты.
В положении "налево" замкнуты контакты 1, 3, при этом включены двигатель М2 и лампочка Н4.
Команды меняются периодически. На схеме показана последовательность команд за один цикл.
Указания по монтажу и наладке системы
Размещение приемника в игрушке желательно производить на максимальном удалении от эл. двигателей и электромагнитов. Для защиты приемника от помех, создаваемых электродвигателями, рекомендуется включать параллельно электродвигателям электролитические конденсаторы 10-20 мкф рабочим напряжением 10-12 вольт, соблюдая полярность включения. К приемнику необходимо подключить антенну. В качестве антенны может быть использован штырь или провод диаметром 1,0-2,0 мм, длиной не менее 20 см. Антенну необходимо изолировать от корпуса игрушки. В качестве изоляторов можно использовать детали из керамики, фторопласта, оргстекла или полистирола. С увеличением длины антенны дальность управления увеличивается. Приемник необходимо закрыть крышкой из изоляционного материала для защиты от пыли и влаги. Расстояние от печатной платы до основания, на котором укреплен приемник, должно быть не менее 5 мм.
Расположение элементов на печатной плате показано на рис.5.
После монтажа электрической схемы и проверки работоспособности (порядок включения указан далее) необходимо подстроить приемник на максимальную чувствительность. Подстройка производится с помощью конденсатора С4 (см. принципиальную схему и чертеж приемника). Поворачивая ротор конденсатора изоляционной отверткой, необходимо найти положение, при котором срабатывание реле происходит при максимальном удалении игрушки ог передатчика.
Желание проверить дальность работы аппаратуры возникло в результате последних событий, произошедших неделю назад. Полет самолета с автопилотом, неожиданно прервался. На высоте 100 метров модель завалилась на крыло и, вращаясь по спирали, упала.
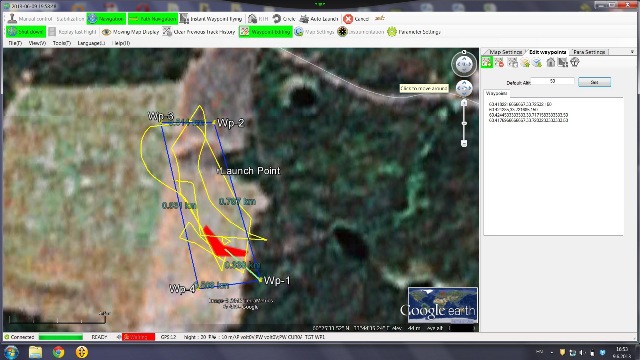
Но после детального исследования параметров по лог файлам в наземной станции, обратил внимание, что произошло переключение режима с полета по точкам на полет в точку взлета (RTH).
И тут стало все понятно, так как я режимы полета не переключал, значит приемник при потере сигнала перешел в режим FailSafe (F/S), но отработал его неправильно. Моя ошибка была в том, что я не установил по каналам элерона, рудера и элеватора значения равные 0, а оставил значение Nor. В нормале приемник запоминает уровень сигнала перед потерей сигнала. Таким образом можно было избежать падения, самолет должен был выровняться и лететь на точку взлета.
В тот момент на самолете был установлен приемник Corona R8FA. Ранее таких фокусов за ним не было замечено, но и нужно сказать, что на дальние расстояния в ручном режиме я не летал.
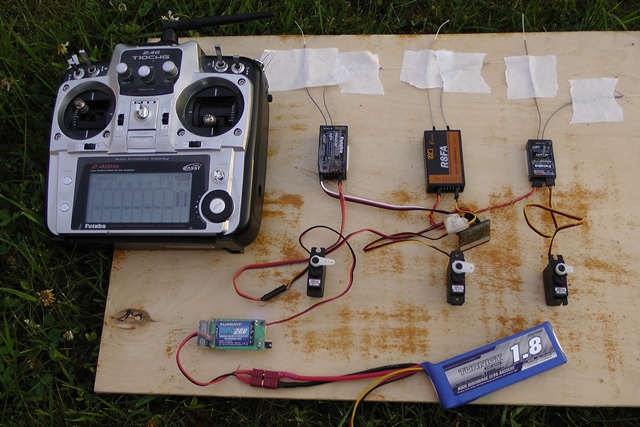
В результате я решил проверить в пределах прямой видимости поведение нескольких оригинальных приемников R6208SB Futaba R6208SB FASST 2.4GHz Serial Bus Receiver (S.Bus) High Voltage R6202SBW Futaba R6202SBW FASST 2.4GHz Dual Serial Bus Receiver (S.Bus) и конечно китайского приемника Corona R8FA Приёмник Corona R8FA 2.4ГГц FASST совместимый с Futaba 2.4Ghz FASST.

В качестве передатчика будет выступать мой проверенный временем пульт Futaba 10CHG. Все приемники сопряжены с пультом в режиме Multi-CH.
В моем пульте, в качестве базовой функции, имеется функция «SERVO MONITOR» (Монитор сервоприводов), с помощью которого можно провести тестирование сервоприводов. Для запуска тестирования сервоприводов у параметра «TEST» переключаем значение в положение «ON», сервоприводы начинают циклически отклоняться.
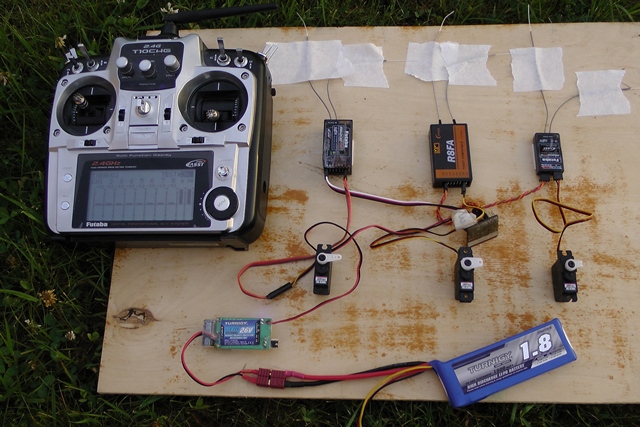
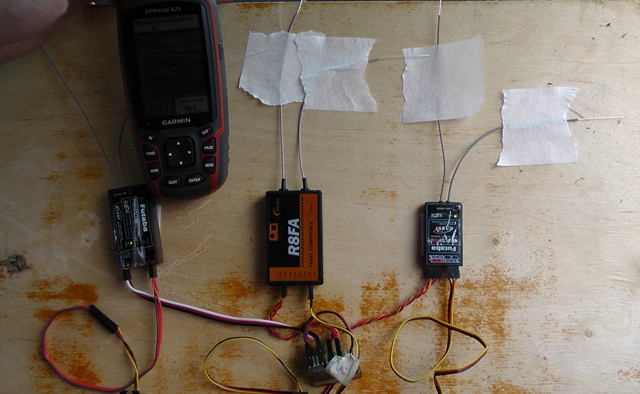
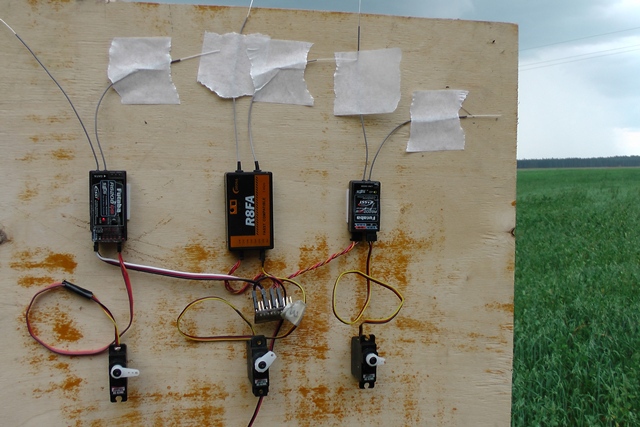
Для экспериментов разместил сразу три приемника на листе фанеры, запитав их от одного источника питания через регулятор напряжения (BEC), во второй канал каждого приемника подсоединил по одному сервоприводу Hitec 82MG. Для визуального наблюдения на них поставил качалки. На фанере все закрепил на толстый двухсторонний скотч.
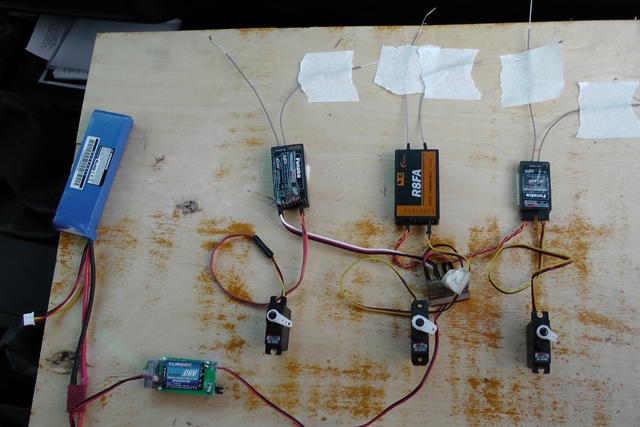
Антенны на приемниках расположил под углом 90 градусов, без перекрещивания, соблюдая рекомендации производителя. Усы на фанере зафиксировал так же скотчем.
Пульт радиоуправления я разместил на высоте 2.5 метра. Антенна на пульте расположена параллельно земле и перпендикулярно к направлению моего перемещения с исследуемыми приемниками. Такое расположение антенны рекомендовано самим производителем аппаратуры.
Поле в длину достаточно большое 1,5 км. Передатчик хорошо просматривается по прямой в выбранном мной направлении. Расстояние я определял с помощью GPS приемника Garmin. Место расположения трансмиттера было отправной точкой, далее я расставлял точки при появлении потери пакетов информации и при пропадании сигнала у исследуемых приемников.
Стенд я нес на высоте 1,5 метров от земли, постепенно удаляясь от передатчика сигнала.
Уже на отметке 389 метров индикатор на приемнике Corona стал вспыхивать красным светом, что свидетельствовало о потере пакетов, сервопривод рывками перемещался вслед за изменением сигнала. На протяжении следующей сотни метров он терял пакеты с информацией, после чего и вовсе потерял сигнал. Индикатор у ресивера Corona постоянно загорелся красным, сервопривод остановился. Приемник больше сигнал не подхватил.
Два оригинальных приемника продолжали работать. В то время как R6208SB начал подмигивал красным индикатором, R6202SBW устойчиво работал, о чем свидетельствовал зеленый светодиод.
Конечно, меня расстроили результаты теста. Особенно я ожидал большего от R6208SB, так как мне для самолета требуется не менее 8 каналов.


От китайского приемника я ожидал подвоха, но не такого, разница оказалась в три раза по сравнению с оригинальным приемником R6202SBW - 389 и 1220 метров соответственно. Приведенные расстояния соответствуют началу потери информационных пакетов приемниками. Ресивер R6202SBW продолжал работать хоть и с потерей информации, только вот из-за размеров поля не было возможности проверить, где же он совсем потеряет сигнал.
Конечно, тестирование вдоль поверхности земли дает не совсем корректный результат, дальность работы систем радиоуправления по воздух обычно больше, но в случае с приемником Corona оказалась примерно одинаковой, судя по логам с модели, 400 метров для него это предел. Помню, на официальном сайте встречалась информация, что футабовский ресивер гарантированно работал на 1,8 км. Думаю, что на модели расстояние будет близкое, если судить по результатам наземных испытаний.
Дальность полета дрона определяется двумя параметрами - возможностями самого дрона и дальностью радиоуправления.
Про сами дроны подробно описано в статье Квадрокоптеры с большим радиусом действия, а в этой статье поговорим про увеличение дальности радиоуправления.
Усилитель-отражатель на антенну
Начнем с самого простого решения - установка пассивного усилителя-отражателей на антенну.

Не смотря на простое изготовление и весьма несерьезный вид, такой пассивный усилитель сигнала позволяет увеличить дальность полета квадрокоптера в 0.5-2 раза. В статье по ссылке выше есть видео положительный тестирования такого девайса с коллекторным квадрокоптером, из своего опыта скажу, что эта штука действительно работает и дальность полета увеличивается.
На видео выше производится тест параболического отражателя, дальность полета дрона с ним увеличилась на 30%. У других тестеров дальность полета увеличивается до 2-х раз, тут все зависит от загаженности эфира в месте полета.
Такой способ усилить сигнал работает с любыми передатчиками, не только произведенными фирмой DJI.
Если нет желания "рукожопить" параболический усилитель-отражатель, то можно купить уже готовые варианты усилителей сигнала.
Transmitter Antenna Signal Enhancement
Купить: BangGood Phantom 3 S/SE дистанционного
Купить: AliExpress Black Mirror Plate Foldable
Купить: BangGood Пульт дистанционного управления усилитель
Купить: AliExpress
Мощная антенна на пульт управления

Следующее решение требует умения "ткнуть паяльником" и "разобрать пульт управления дроном". Вместо штатной антенны устанавливается антенна от WiFi роутера с большим коэффициентом усиления (dBi).
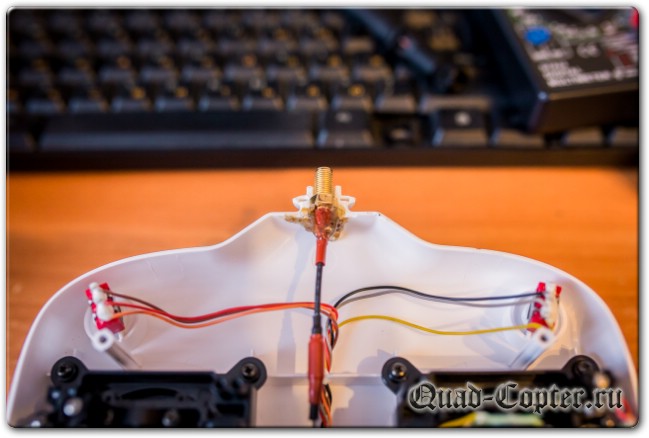
Фактически, необходимо отпаять штатную антенну и на ее место впаять провод от разъема, а к нему можно крепить уже любую антенну.

Вот вариант использования самодельной Vee антенны вместе с внешним ВЧ блоком.
Так как аппаратура радиоуправления авиамоделями и дронами работает на частоте 2.4 ГГц, то к ней прекрасно подходят антенны от WiFi, которые работают на той же частоте.

На квадрокоптере, для увеличения дальности полета, тоже не лишним будет заменить штатную антенну на имеющую большее усиление.
Вот варианты готовых антенн и разъемов для них.
2.4GHz RP-SMA Male 16dBi
Купить: BangGood Cewaal Новый 2.4 ГГц
Купить: AliExpress 2.4GHz 5dBi Wireless Wifi
Купить: BangGood Бесплатная доставка 2,4 ГГц
Купить: AliExpress Mini RP-SMA to IPX
Купить: BangGood Удлинитель UFL на RP
Купить: AliExpress
Как произвести замену антенны пульта управления
На видео выше производится модернизация квадрокоптера Syma для увеличения дальности полета путем замены штатной антенны-проводка на внешнюю с большим dBi.
А на этом видео установка внешней антенны на пульт FrSky Taranis.
Как видите, процедура очень простая, требует только аккуратности и умения паять, от типа пульта - практически не зависит.
Если вы только начинаете свой путь в мир радиоуправления, то смотрите статью Какой пульт управления дроном выбрать.
Установка бустера на пульт управления дроном
На видео выше делается проверка дальности радиоуправления с мощной антенной, а так же усилителями (бустерами) на 1 и 2 Ватта.

Стоит учитывать то, что со штатной антенной дальность радиоуправления на аппаратуре с видео составляет 900-1100 метров!
Как видите, использование бустера очень сильно увеличивает дальность управления вашим дроном!
А использование бустера и направленной антенны на 2.4 ГГц позволяет улетать на 65 км и вернуться!
Обычно такие дальние полеты выполняются на авиамоделях, тк они тратят меньше энергии на поддержание полета, но квадрокоптеры тоже могут летать далеко.
Ссылки на бустеры для пультов квадрокоптеров смотрите ниже
2.4G 2W Radio Signal
Купить: BangGood DJI Phantom запасных частей
Купить: AliExpress Turbowing RY-2.4 2.4G Radio
Купить: BangGood Оригинальный turbowing ry 2.4
Купить: AliExpress
Если вы хотите узнать больше о дальних полетах на дронах, то смотрите статью по ссылке расположенной в самом начале этой статьи.
На этом про увеличение дальности полета пока все, про увеличение дальности FPV приема видео будет отдельная статья.
Дальность полета квадрокоптера зависит от мощности передатчика установленного на пульте управления.
Обычно дальность полета составляет около километра, так как пульты управления использующие частоту 2.4 ГГц имеют гарантированную дальность в 900 метров.
Если летать за городом и с удалением подниматься выше в небо, то дальность может составить и 2 километра от точки взлета.
Для того, что бы улетать дальше - надо использовать усиление сигнала или использовать аппаратуру радиоуправления с более мощной ВЧ частью.

На фото он нижнем левом углу. У Taranis гарантированная дальность радиоуправления 1.5 километра. За городом удавалось улетать на 3 км от точки взлета.
По центру на стульчика - видеошлем для FPV полетов, авиамодель - это Volantex Ranger 757 , на столе из паллет пара квадрокоптеров - Eachine Racer 250 и Typhoon G .
Для более дальних полетов можно пойти по нескольким путям.
Увеличение дальности полета за счет антенны
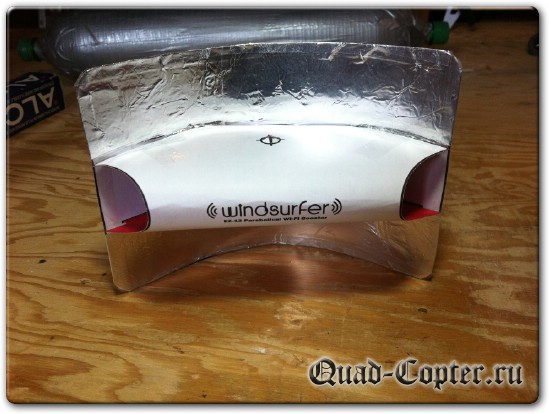
Можно установить антенну с большим dBi или установить параболический отражатель. На фотографии выше как раз самодельный параболический отражатель.

Если нет желания делать такой своими руками, то можно купить готовый параболический отражатель тут или здесь .
Не смотря на свою простоту - такой антенный усилитель работает, в среднем дает прирост на 900 метров к полетам без усилителя.
На картинке выше - два полета, нижний - без параболического отражателя (1.3 километра), верхний с отражателем (2.4 км), как видите - прирост весьма значительный.
Установка промежуточного усилителя на пульт управления квадрокоптером

Обычный пульт управления имеет мощность передатчика в 10мВт, если между ВЧ частью и антенной поставить промежуточный усилитель в 1-2 Ватта, то дальность полета с 900 метров увеличится до 10 километров.
Я так далеко не отлетал, а знакомый проводил эксперимент - на приемник поставил RC-Switch, который включал лампочку. Лампу поставил на окно, отъехал на 10 км и с помощью подзорной трубы наблюдал как включается и выключается лампочка с помощью пульта управления. :-)
Купить усилитель сигнала пульта управления можно тут. .
Установка LRS модуля в пульт управления

Третий способ увеличения дальности полета квадрокоптера - это установка LRS модуля.
В пульт управления Taranis или Turnigy такой ВЧ модуль вставляется без проблем, останется только установить приемник в ваш квадрокоптер и можно будет отлетать на 3-5 км от точки взлета.
Увеличение дальности FPV
Кроме управления надо дорабатывать и FPV часть, так как улететь с одним из вышеприведенных вариантов то не проблема, но проблемой может стать потеря видеосигнала.
Для увеличения дальности можно установить видеопередатчик повышенной мощности.

Видеопередатчик на 600 мВт - с нормальными антеннами позволяет улететь на 2-3 километра.

Видеопередатчик на 2000 мВт - дальность полета с таким видеопередатчиком будет около 10 км.

Так же можно улучшить и видеоприемник установкой на него направленной антенны .
Направленная антенна не позволит летать "вокруг себя", но при полете в одну сторону сильно увеличит дальность приема даже на имеющемся видеопередатчике.

Давно ничего не писал, — зачесались руки)) Уверен, кому-то это пригодится=)
Решил выложить пост, о небольшой прокачки детской машинки на пульте управления.

Суть поста вкратце: заряжаемые аккумуляторы вместо батареек.
Дальше много букв и фоток))
Часто, мой мелкий просит, чтобы я поиграл с ним (машинками). Так довелось, что с самого раннего возраста, а именно с 6-7 месяцев он полюбил машинки. Сейчас уже ему перевалило за 3 годика, но интерес к машинам стал еще больше. В 2 годика начал учить его говорить марку автомобиля по эмблеме. Выучил довольно не плохо, теперь ходит по улице мимо машин и называет марку)) Когда ему исполнился годик, я купил ему 2 машинки на пульте управления (сначала лексус is250, затем гелик. обе одной серии). Машинки до безобразия простые, 4 кнопки управления — вперед-назад, повороты влево-вправо.
Трех батареек АА нам обычно хватает на 2-3 дня. Спустя 1-2 часа прилично падает мощность и весь драйв машинки пропадает. Поэтому решил переделать питание от аккумуляторов. Плюсов от этого не мало. Постоянная мощность, может долго ездить на одной зарядке, не нужно платить больше))
Опишу в деталях, что было сделано.
Сначала я разобрал гелик, чтобы посмотреть что у него внутри. В машинке оказалось достаточно просторно. Внутри легко можно было разместить 3-4 аккума 18650, но я решил что двух 18650 емкостью 3200 мАч будет достаточно. Суммарно от двух аккумов выходит 6400 мАч (не во всех ноутах есть такая емкость).
Наша машинка работает от трех АА пальчиковых батареек, соединенных последовательно, что дает в сумме 4,5В. Следовательно, понадобится аккум на 3,7В, это достаточно, чтобы машинка бодро ездила.
Немного погуглив, нашел цены и нужную емкость. Остановился на Panasonic NCR18650BE.

Заказал на алиэкспрессе, т.к. цена одной батарейки у нас почти в два раза дороже.
Чуть позже выяснилось, что они без защиты от разряда. Это нам не подходит, т.к. "голова" машинки не знает что такое зарядка. Поискав немного, нашел точно такой же аккум с защитой, стоили чуть дороже, но было уже поздно, батарейки были уже в пути.
Начал искать на алиэкспрессе контроллер защиты от разряда. Нашел, заказал. Позже выяснилось, что нужно еще защита от перезаряда)) Снова лезу на али, ищу двойную защиту и нахожу!))
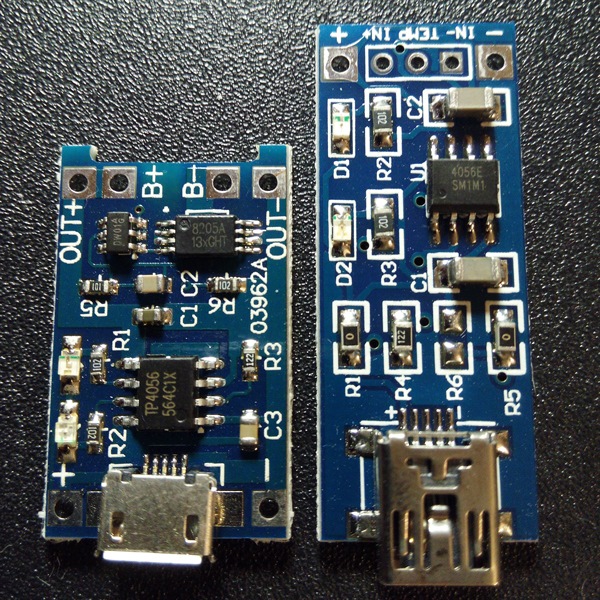
Слева защита от полного разряда и перезаряда (порт microUSB). Справа защита от перезаряда(порт miniUSB) Оба контроллера с индикатором (по завершению зарядки, горит другим цветом)
Суть в том, что литий-ионные аккумы нельзя разряжать меньше 2,5-2,7В и заряжать больше чем 4,2В. Их структура быстро разрушается и они быстро выходят из строя. Мобильные аккумы работают по такому же принципу. Обычно защита встроена в аккум.
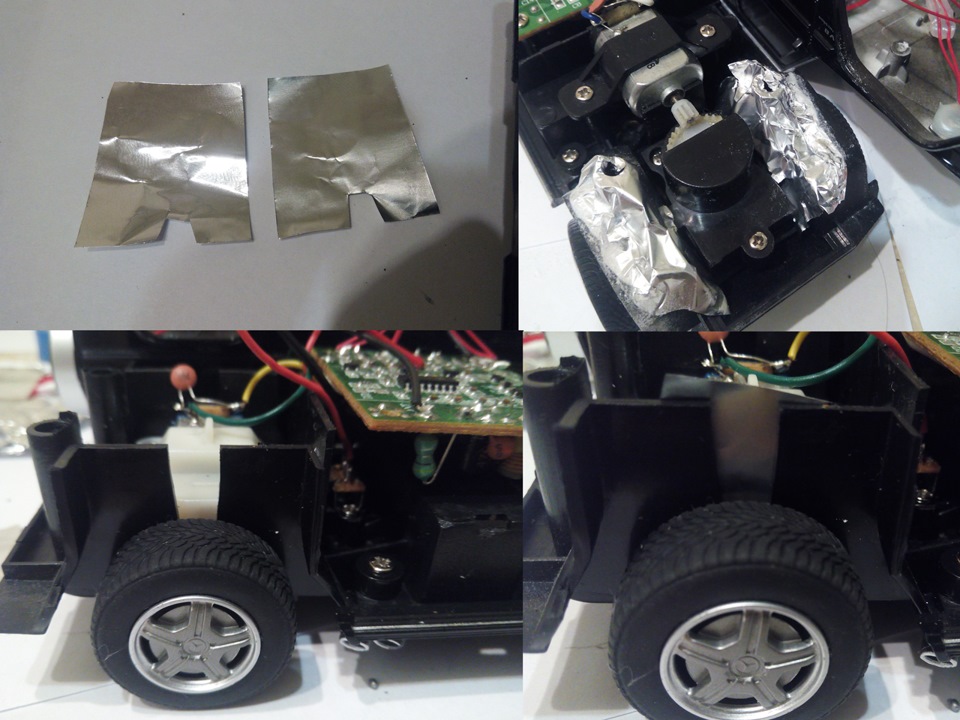
Чтобы в будущем не иметь проблем с отсоединением проводов, я припаял к контроллеру питания двухпиновые JST коннекторы.

Это нужно, чтобы легко можно было отсоединить аккумы от корпуса. Проверил работу контроллера, заряжает!)) Сделал отверстие для миниUSB и посадил контроллер питания на термоклей. Оба аккума спаял последовательно проводами, предварительно обработав места пайки активной кислотой(флюс). В итоге получаем двойную емкость на 6400 мАч.

Изначально планировал поездки по улицам, поэтому, внутри проклеил (секнудным клеем) все отверстия фольгой, чтобы мусор не попадал в машинку.
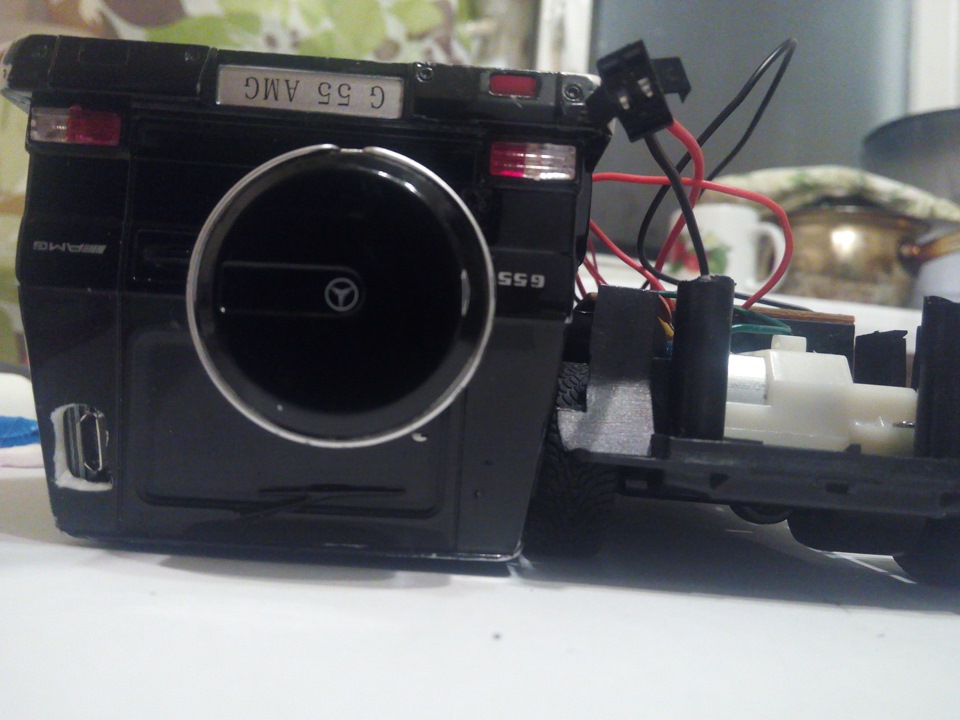
Аккумы приклеил термоклеем к кузову, но они быстро отвалились. Пришлось секундным клеем с содой проклеть еще и края. Проверенно, держится железно! Падал со стула и дивана))

Минус такого решения в том, что наезд на любое мелкое препятствие любым колесом — машинку опрокидывает на бок. Аккумы на крыше все же делают свое дело. Думаю позже контроллер машинки переместить на место батареек в самый низ, а аккумы на место контроллера, тогда машинка будет устойчивее.

Немного фоток рабочего процесса:


Разобрал корпус моторчика, смыл весь белый солидол и смазал синтетическим солидолом. Не знаю насколько это правильно, другого у меня не было)) Мне не понравилось, что весь моторный отсек был заполнен заводским солидолом. Я смазал только те участки, где было необходимо.



И наконец, подвеска для плохих дорог была заменена=)) Родные амортизаторы были слишком ватные, решил нарезать из жесткой пружины, получилось не плохо)) Пружину достал из пульта убитой ламборджини и нарезал кусачками)) Теперь у нас спортивные пружины, встали как родные)))))


P.S.
Есть еще один вариант подключения аккумов. Я тогда в них еще не разбирался, поэтому заказал 18650, на фото они выглядели такими же, как и пальчиковые АА.
Понадобятся 3 аккума NCR 18500, но нужно брать без защиты. С защитой они будут чуть длинее и не залезут в штатное место без напильника. Затем остается перепаять лоток батареек для параллельного соединения. Иначе на выходе получите 11.1В и сгоревший контроллер машинки))
Кому нужно больше мощности на заднем приводе, можно купить специальный бустер DC DC, который из 3,7 вольт на выходе отдаст 5В. Машинка станет более резвой. Но есть в этом и минусы. Думаю, будет быстро греться, могут часто выходить из строя моторчики, возможно и контроллер быстрее "приедет", аккум будет немного быстрее разряжаться. Можно конечно настроить и под 4,2-4,5В, но понадобится специальный DC DC, который можно настроить на вольтаж от 3,7В до 12В (спец. крутилка, а мультиметром замер напряжения на выходе).
UPD. 20.05.2016
Спустя 9 месяцев машинка перестала ехать вперед. Задний ход работал. Думал моторчик "приехал", но нет. Замена моторчика не помогла. Благо у меня был лексус из той же серии. Выпаял все провода, и подсоединил к гелику. Машинка заработала. Теперь у гелика третья жизнь!)))
Заодно переместил контролер в отсек батареек, отрезал родные места крепления и припаял их к днищу, на них уже прикрутил сам контролер.
Сделал это из-за того что аккумы были приклеены к крыше, изза этого центр тяжести был нарушен. Машинка переворачивалась набок при повороте наехав на небольшой камушек.
Читайте также: