
Как сделать из лего квадрокоптер который летает
Обновлено: 07.05.2024
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью в виде обобщения моего личного опыта и опыта других людей, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон.
1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.
Сразу отчет о том, что у меня получилось:
На видео заметно, что во время полета у дрона пропали ножки, но об этом позже
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрик и летать?
О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации. В качестве альтернативы могу предложить MJX Bugs 3. Обзор на него здесь. Цена от ~120$.
В: Нужно ли паять?
О: Да, нужно!
В: Собрать квадрик самому дешевле, чем купить в магазине?
О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Список к покупке:
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно.

Все, что вы получите в комплекте. На картинке не показаны соединительные провода от контроллера к передатчику
1) Набор деталей с Aliexpress ~4000 руб.
1.1 Рама
1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А
1.3 Регуляторы Emax Simon K Series на 12A
1.4 Распределительная плата и провода питания
1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL. Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах).
1.6 Соединительные провода от контроллера к передатчику
1.7 4 пропеллера (2 левых, 2 правых)
1.8 Винты и шестигранники. Не знаю как у остальных, а мне положили аж 4 одинаковых шестигранника для винтиков, которыми крепятся моторы, но ни одного для закручивания винтов на раме
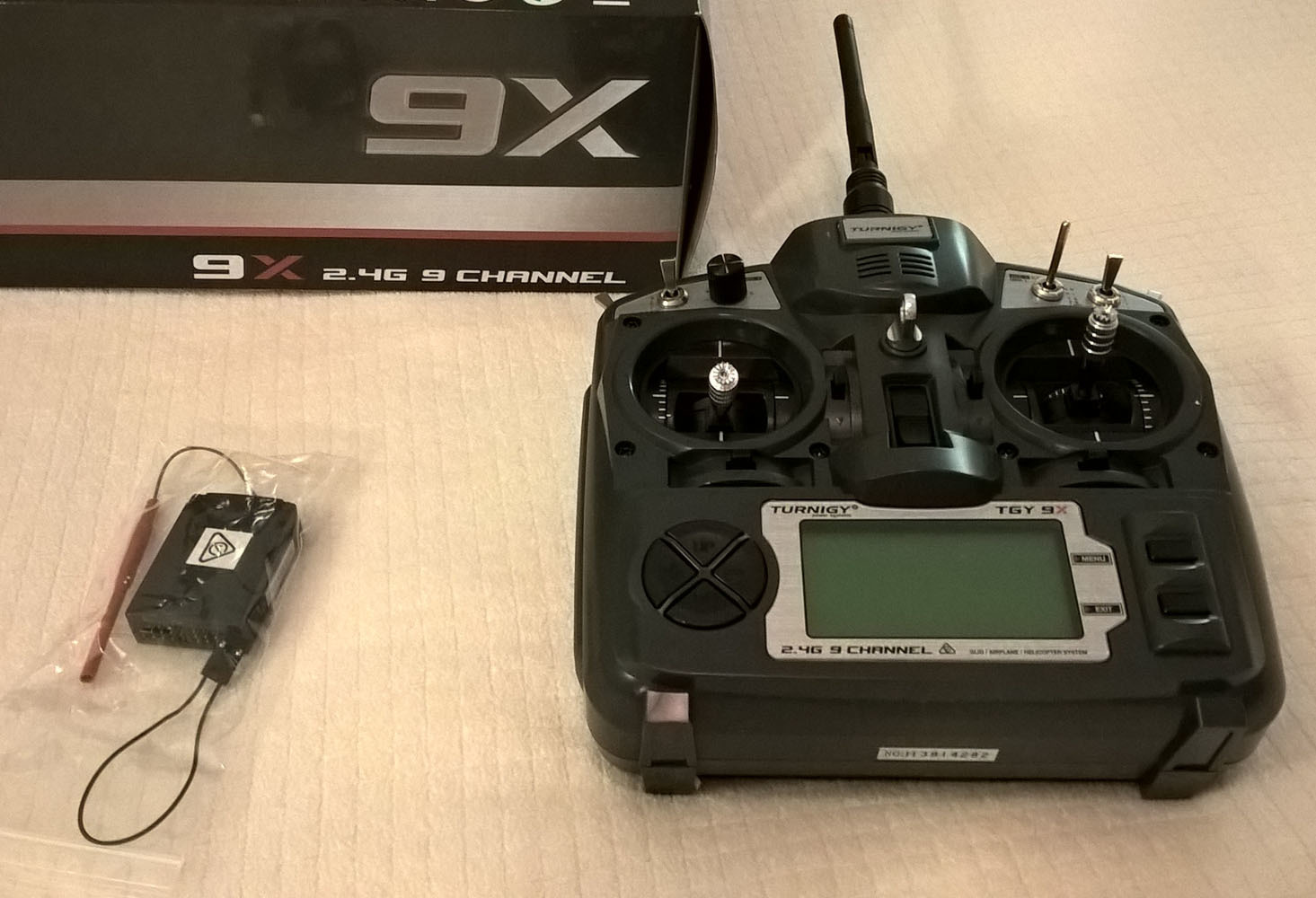
Приемник и передатчик Turnigy 9X
2) Пульт радиоуправления Turnigy 9X 9Ch + приемник (все в одном коплекте) ~3400 руб.
В: Почему именно эта модель?
О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.
В: Можно ли взять модель подешевле?
О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб.
Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
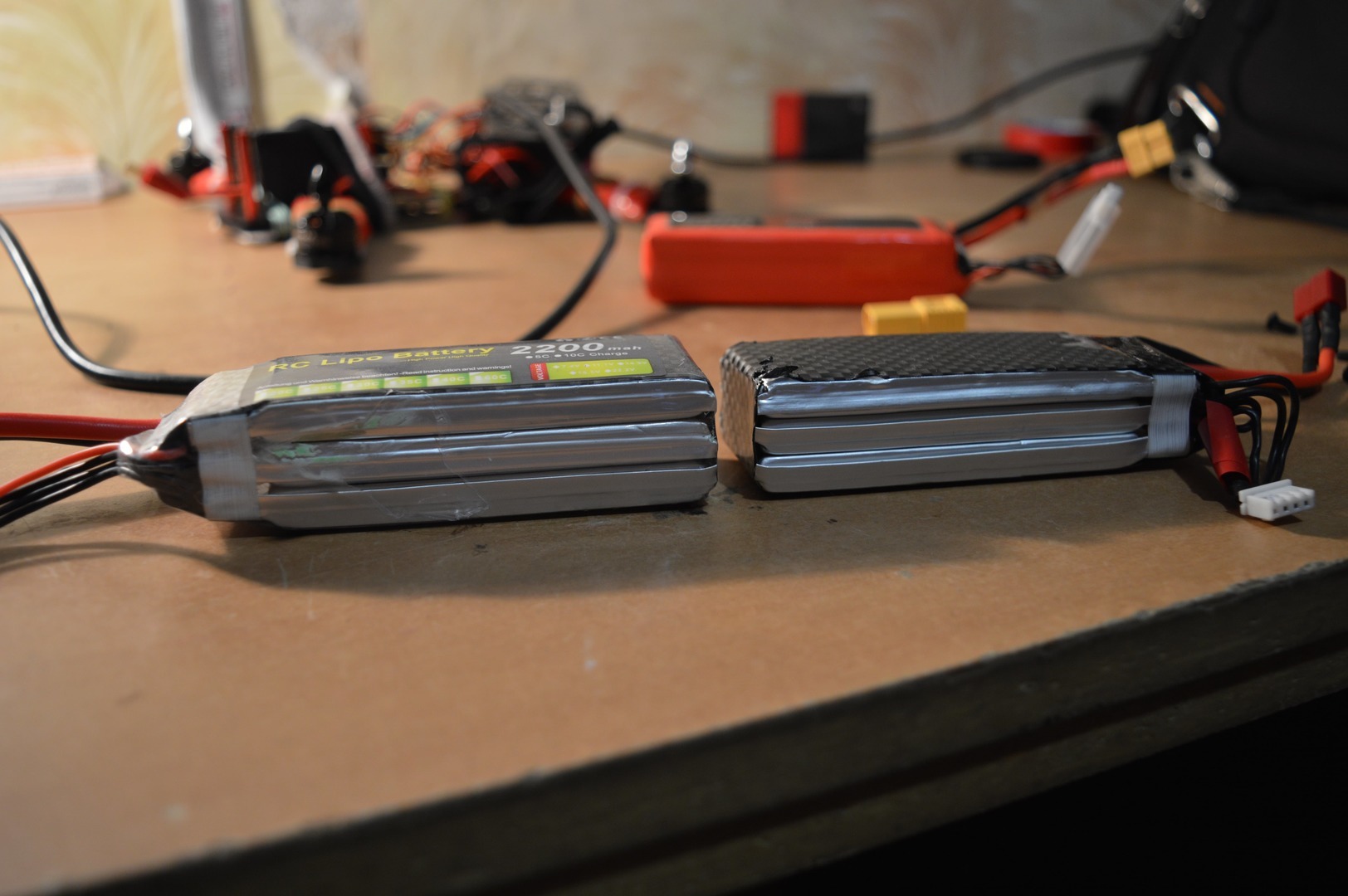
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.
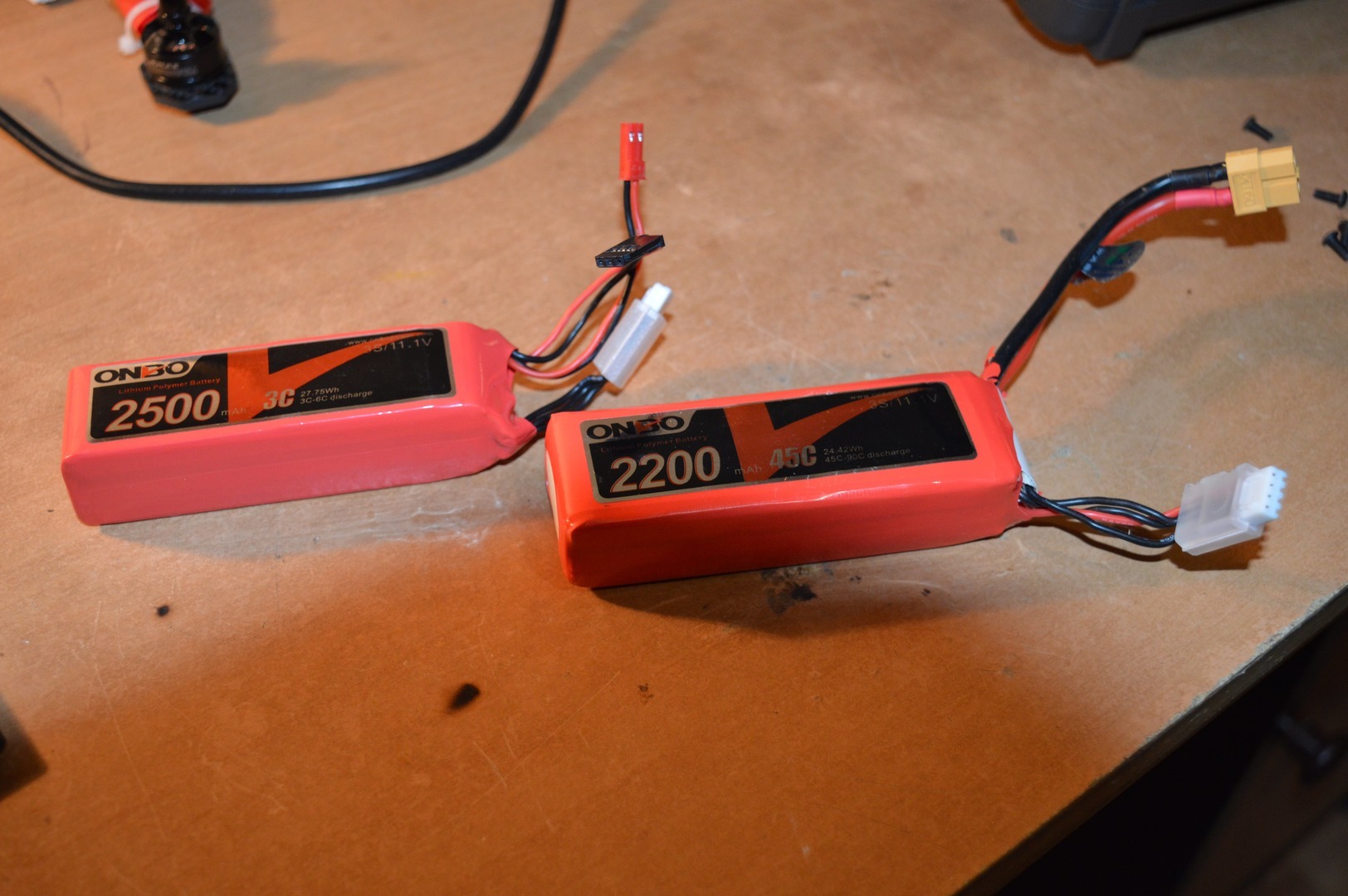
Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера
4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.
В: Зачем два? Тебе одного мало?
О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь.
Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.

Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается
5) Аккумулятор для пульта радиоуправления. ~1199 руб.
В: Я же уже купил два. Нужен еще один?
О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда.
В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема. В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается.
6) Зарядное устройство для аккумуляторов iMAX B6 ~1230 руб.
iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.
В: Как этим пользоваться? Какие режимы выбрать?
О: Ответы здесь
7) Переходник с XT-60 на T-коннектор ~140 руб.
Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет.
8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб.
Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться.
9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 + 50 руб.
Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.

4 винта на 16 мм вместо 8 мм
10) Мелочовка ~ 300 руб.
10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму
10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати). Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности
10.3 Термоусадка. Пригодится, когда будете прятать регуляторы
10.4 Пластиковые хомуты 10 см (9 шт.) Для фиксации регуляторов
10.5 Двухсторонний скотч, изолента
10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия
10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторов
Защита для пропеллеров, напечатанная на 3D принтере
10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель.
Всю мелочовку покупал тут1 и тут2.
10) Паяльник само-собой.
Общая стоимость ~11878 — 13217 руб.
Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз.
Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Сборка
Сборка рамы
Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Так было у меня. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз. Верхнюю часть на данном этапе прикручивать вообще не стоит, без нее работать с внутренностями коптера удобнее. Также не стоит забывать про шайбочки, о которых я писал выше.


Не забываем про шайбы. У вас конечно же белой пластины нет — это те самые остатки от 3D напечатанных ножек
Установка моторов
Очень простая операция, если помнить про направления вращения двигателей. Определитесь, где у вас будет перед. Моторы с черной гайкой, вращающиеся по часовой стрелке, ставим на переднее левое и заднее правое места.

Обратите внимание на расположение двигателей

Крепление двигателей
Пайка
Пайка распределительной платы
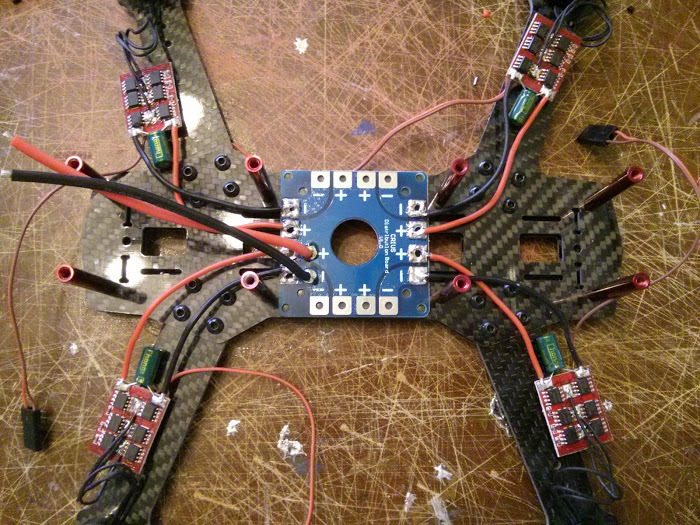
Итак, вы уже примерились и решили, как у вас все будет установлено. Время паять. При пайке платы самое главное соблюдать полярность! На какие места паять провода не важно, все зависит от того, как вы собираетесь установить плату.
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Мой вариант)
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Другой вариант)
Припаиваем регуляторы к моторам
Первым делом снимаем с регуляторов стандартную красную теромоусадку. Для того, чтобы моторы вращались в нужную нам сторону, регуляторы к моторам следует припаять вот так:
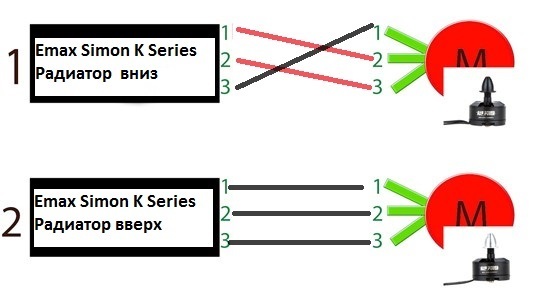
Подключение регуляторов к моторам
Думаю, что у вас возник вопрос: куда деть длинные провода от регуляторов. Их можно отпаять и убрать совсем, а можно обрезать под нужную длину. Второй способ для начинающих предпочтительнее, так как меньше шансов перегреть регулятор при пайке.

Полностью отпаянные штатные провода регулятора. Так делать не советую, лучше просто укоротить провода (не обращайте внимание на расположение проводов, картинка взята, чтобы показать другое. Правильная схема сверху)
Припаиваем T-коннектор. Полярность важна!
Крепим плату питания, регуляторы оборотов
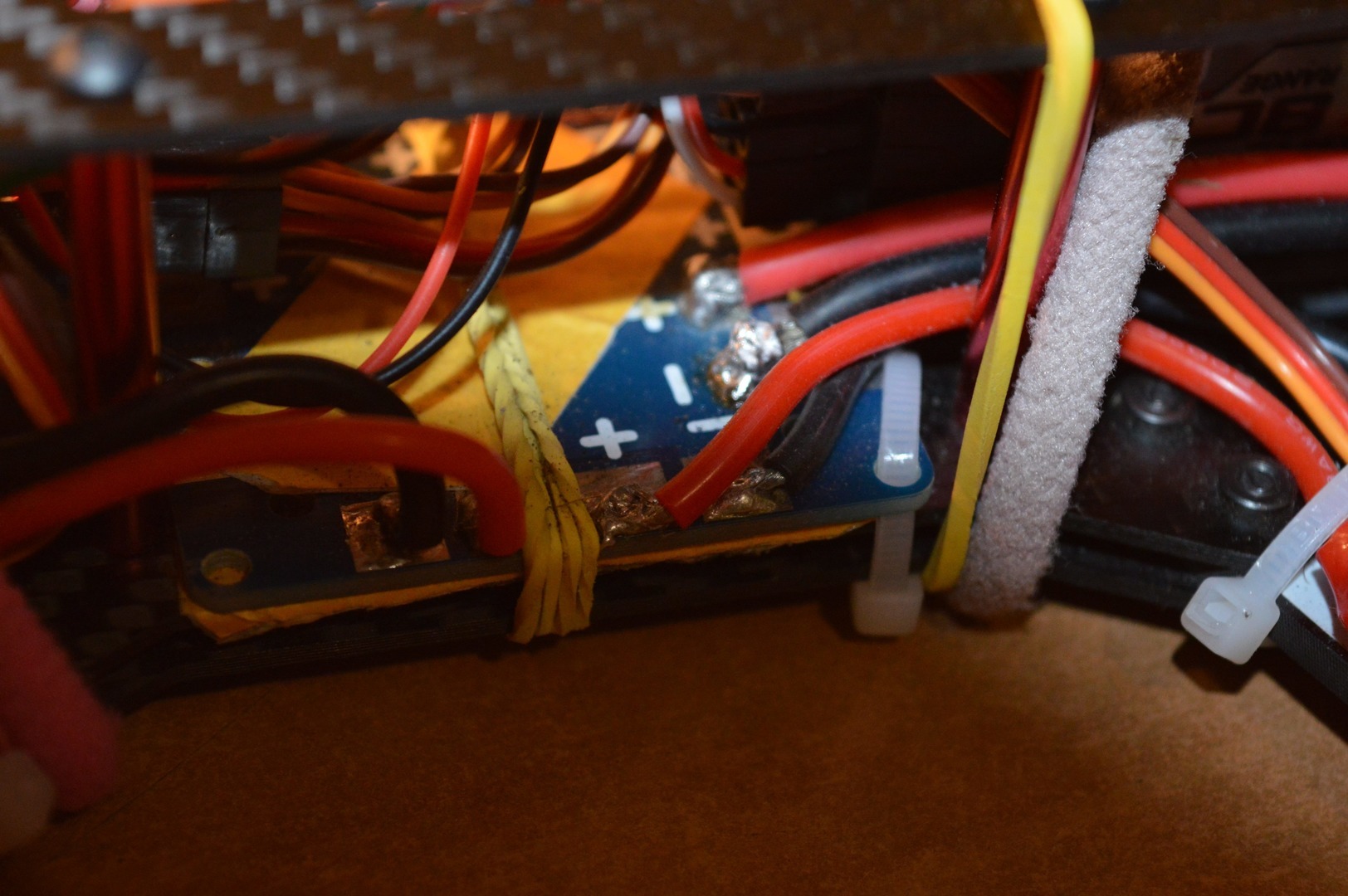
Время крепить. Помните, что рама коптера проводит ток, поэтому плата должна быть изолирована от нее. Я посадил ее на два слоя двухстороннего скотча, с одного края притянул хомутом, а после закрепил резинкой.
Крепим плату. Два слоя двухстороннего скотча + хомут + резинка
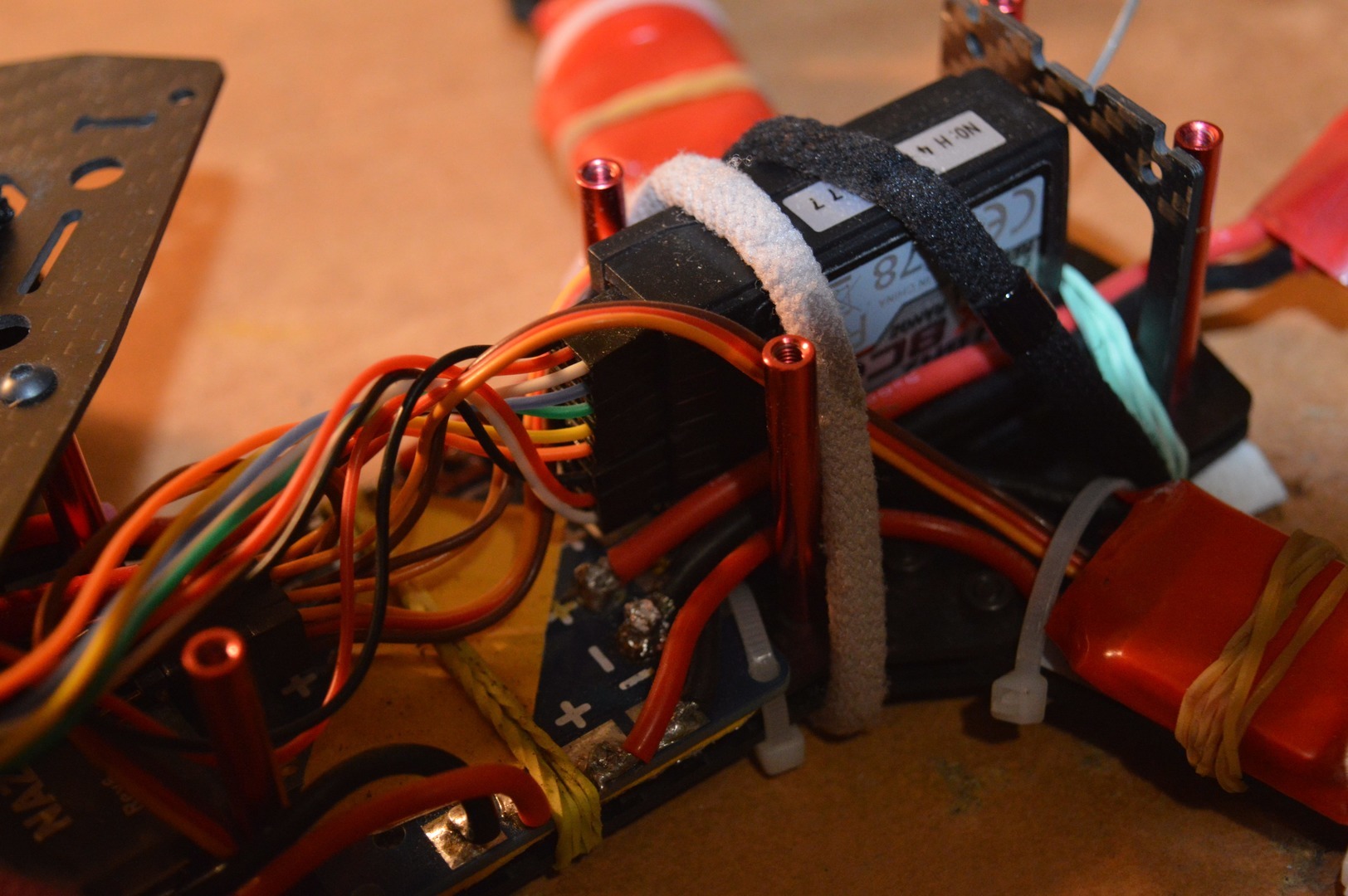
Регуляторы оборотов я спрятал в термоусадку, посадил на двухсторонний скотч, затянул хомутами и для уверенности затянул резинкой. Выглядит более чем надежно

Крепим регуляторы. Термоусадка + двухсторонний скотч + хомуты + резинка
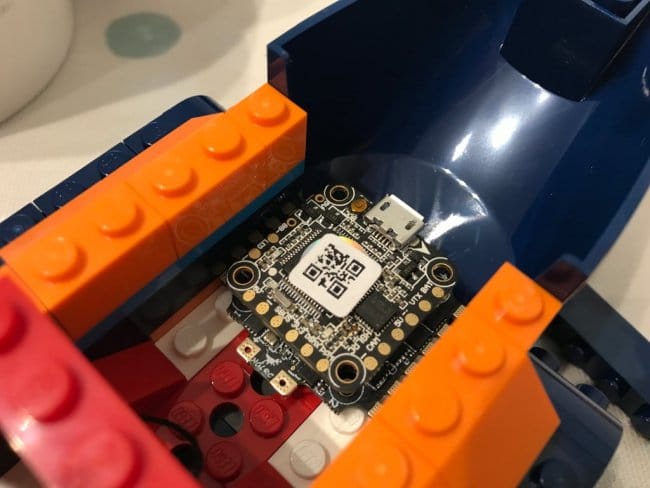
Крепим полетный контроллер, приемник
В дело опять вступают двухсторонний скотч и резинки. Опять же, чем жестче вы закрепит, тем лучше.
У меня это сделано следующим образом:
Крепим полетный контроллер (1). Трава осталась после краша
Крепим полетный контроллер (2)
Крепим приемник. Торцом он тоже сидит на двухстороннем скотче
Соединяем все проводами
Регуляторы к полетному контроллеру
От каждого из регуляторов у нас идет по 3 провода. Сделать нужно следующее: на трех из четырех регуляторах нужно вытащить из разъема красный провод. Подсоединять провода к контроллеру нужно в определенном порядке, об этом будет рассказано в следующей части.
На трех из четырех регуляторах нужно вытащить из разъема красный провод
Приемник к полетному контроллеру
А вот здесь порядок подсоединения проводов к каждому каналу не важен. Нужно лишь правильно подключить провод питания — белый провод ближе к стороне с наклейкой.
Соединяем приемник с полетным контроллером. Провод питания должен быть расположен белым ближе к стороне с наклейкой
Прикручиваем верхнюю часть рамы, смотрим, что получилось
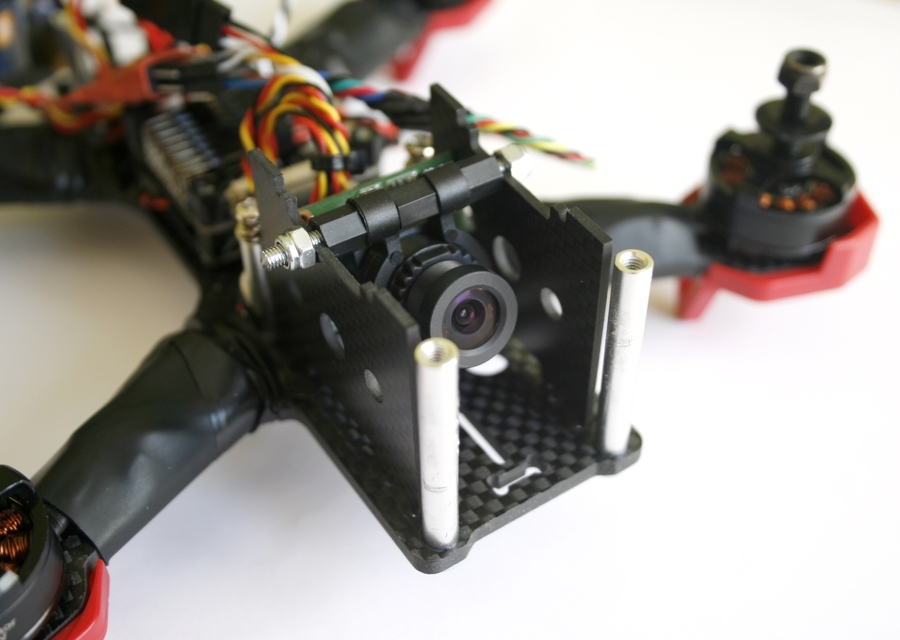
Я также добавил «крепление для камеры».
«Крепление для камеры»
Итого:


О падениях и, что делать пока ждем посылку
Будьте готовы к тому, что сначала будут падения. А это: сломанные пропеллеры, ножки и камера в моем случае.

Сломанные ножки

Сломанная камера. Кстати, советую дополнительно заклеивать скотчем разъем с флешкой, есть шанс потери при падении
А вот видео с моего самого первого полета:
Чтобы такого не происходило, советую прикупить маленький квадрик для комнатных полетов. За время ожидания скилл управления поднимется очень сильно. Мой выбор пал на Syma X12S. Цена вопроса ~1445 руб.
Обещанные ссылки на статьи
Рад, если кому-то помог! Также открыт для ваших замечаний и комментариев.


Шаг второй: крепление двигателя
Расположение крепежных отверстий стандартного бесщеточного мотора 1806 практически такое же, как и у шпилек на стандартной пластине LEGO 2x2. Каждое крепление «двигателя» на квадрокоптере имеет плитку темно-серого цвета 2x2 (LEGO 3022) и сверху плитку светло-серого цвета 2x2 с вертикальным штифтом (LEGO 2460), которая обычно удерживается на ступицах пропеллера LEGO.
Мастер сверлит крепежные отверстия. На моторах, по центру имеется отлив. По центру плитки сверлится отверстие под нее. Закрепляет двигатели.




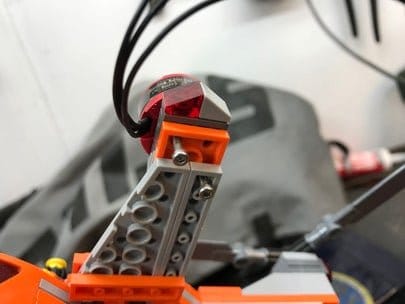




Шаг третий: плечи
Переставляя «плечи» квадрокоптера, можно немного изменить компоновку, чтобы обеспечить более широкое или более узкое расположение двигателей и расположение винтов относительно друг друга.
Стандартная сборка LEGO (первое фото) имеет «плечи» и двигатели, расположенные широко (горизонтально) с довольно большим перекрытием винтов. Мастер переделывает «плечи» и разводит двигателя и, соответственно, винты.



Шаг четвертый: электроника
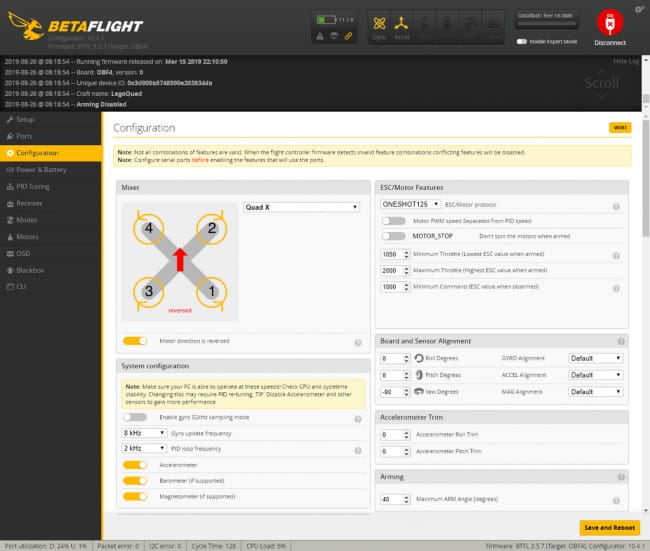
Согласно схемы производит монтаж электроники. На первом фото приведена схема направления вращения двигателей. Направление вращения, так же, можно будет изменить на этапе программирования.
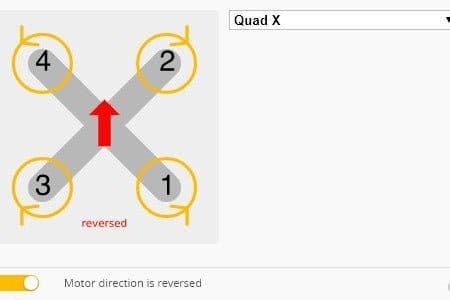
После того, как монтаж завершен, и перед подключением батареи, мастер проверяет соединения, во избежания обрыва или замыкания.
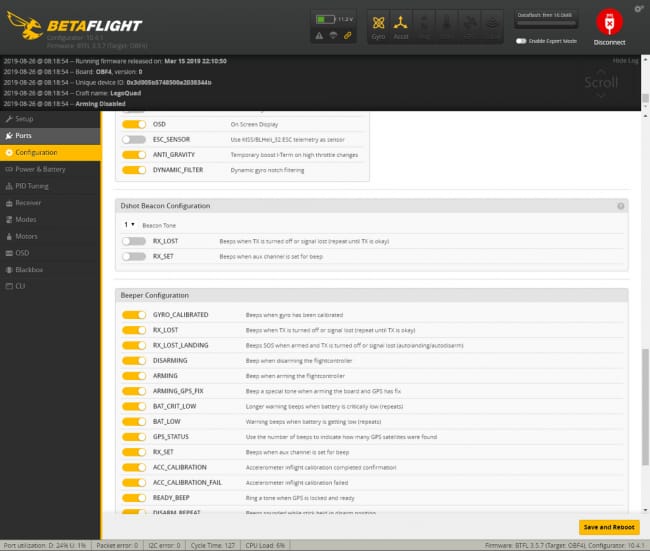
При включении питания вы должны увидеть включенные огни контроллера полета и несколько звуковых сигналов от ESC.
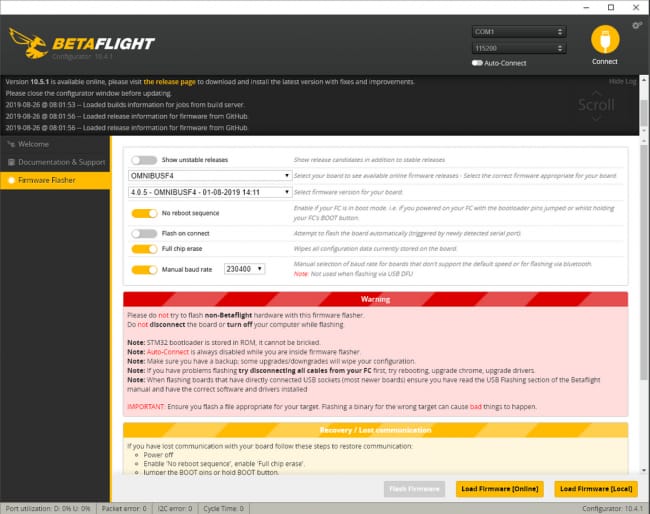
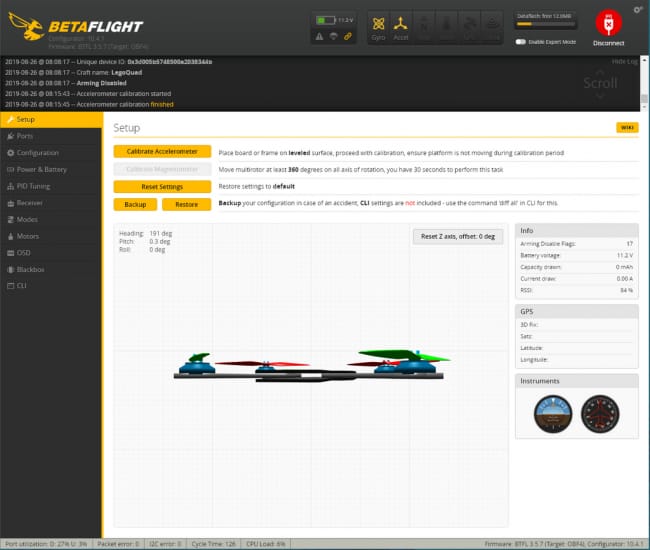
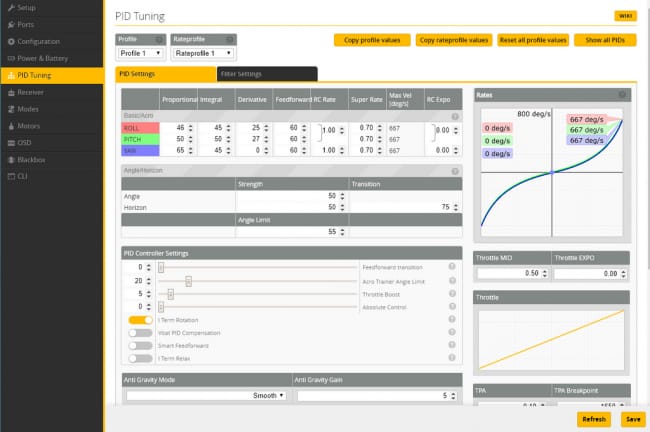
Скачайте и залейте соответствующую прошивку для контроллера полета.
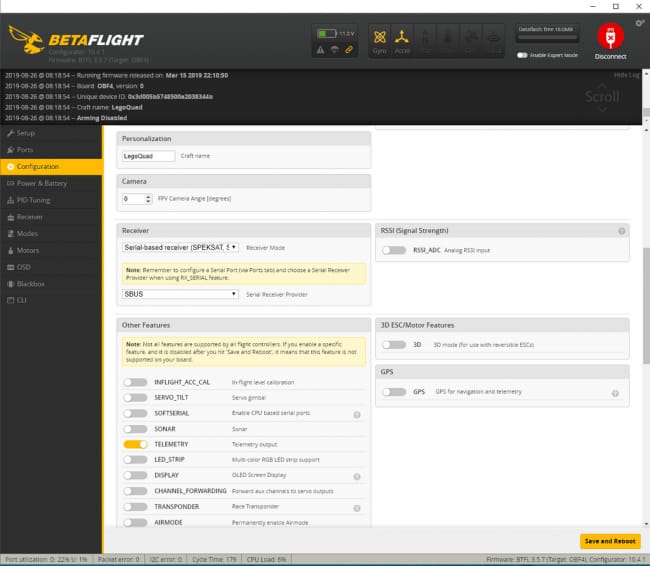
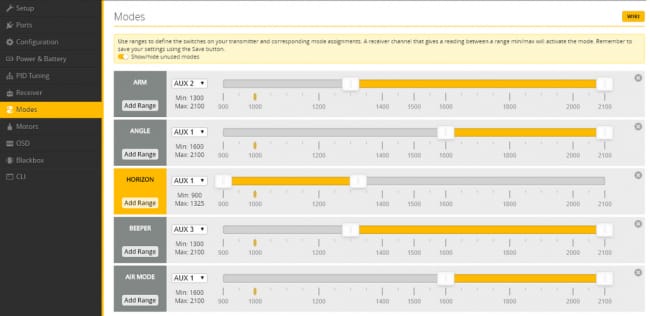
Настраивает режимы.
ARM вкл / выкл
HORIZON для самовыравнивания / ACRO для традиционного полета FPV
BEEPER - полезно, если вы потеряете модель в высокой траве или кустах.
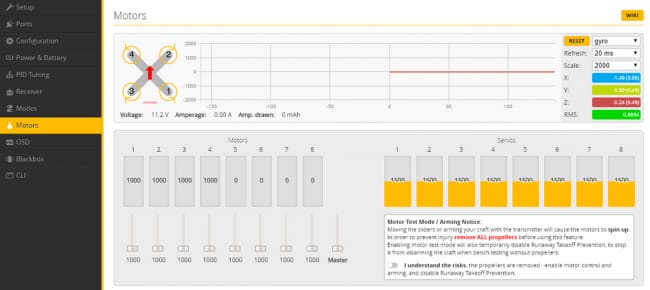
Вкладка «Моторы» - используйте эту опцию для проверки каждого двигателя в отдельности, и, что важно, отметьте направление вращения каждого из них
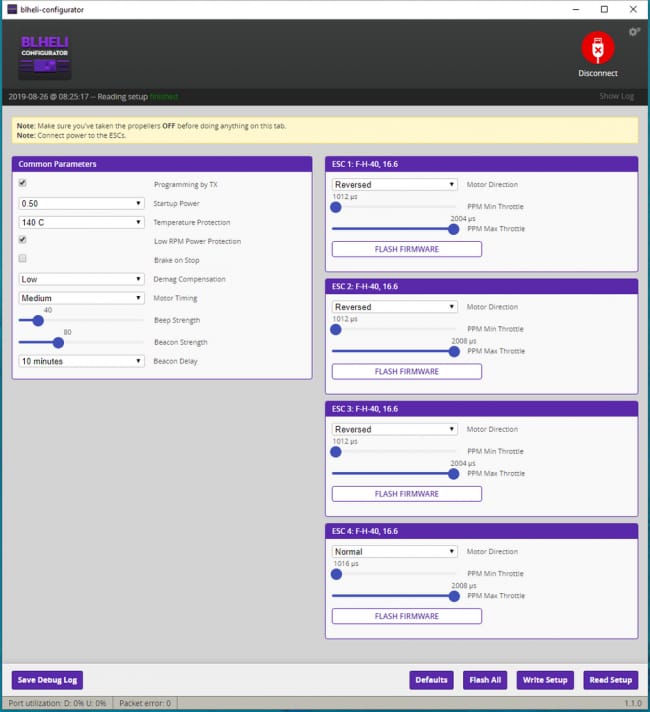
Исправьте любое неправильное направление вращения с помощью конфигуратора BLHELI
После всех этих шагов можно отключить USB и батарею, а затем включить питание и проверить, что все работает:
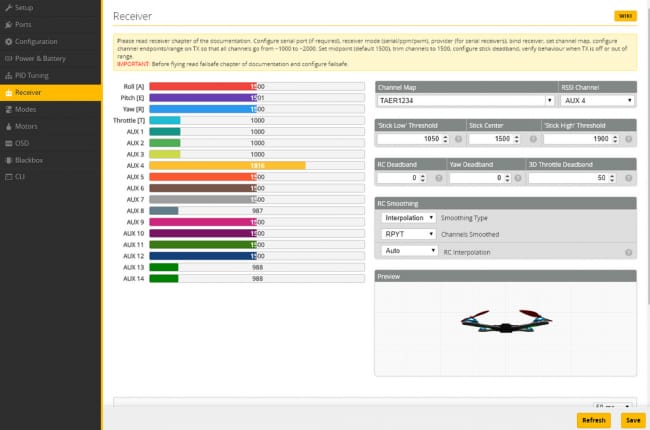
Включить передатчик и питание
Подключите батарею и установите квадрокоптер на ровном участке поверхности
Включите переключатель ARM, и моторы должны начать вращаться с низкой скоростью
Проверьте дросель увеличивая обороты
В горизонтальном режиме попробуйте наклонить квадрокоптер и убедитесь, что двигатели реагируют соответствующим образом, например, наклоните его вперед, и передние двигатели будут ускоряться.

Шаг шестой: окончательная сборка
Практически вся конструкция корпуса держится с помощью монтажных замков. Единственно при креплении моторов мастер использует термоклей.
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX H2205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель. .
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
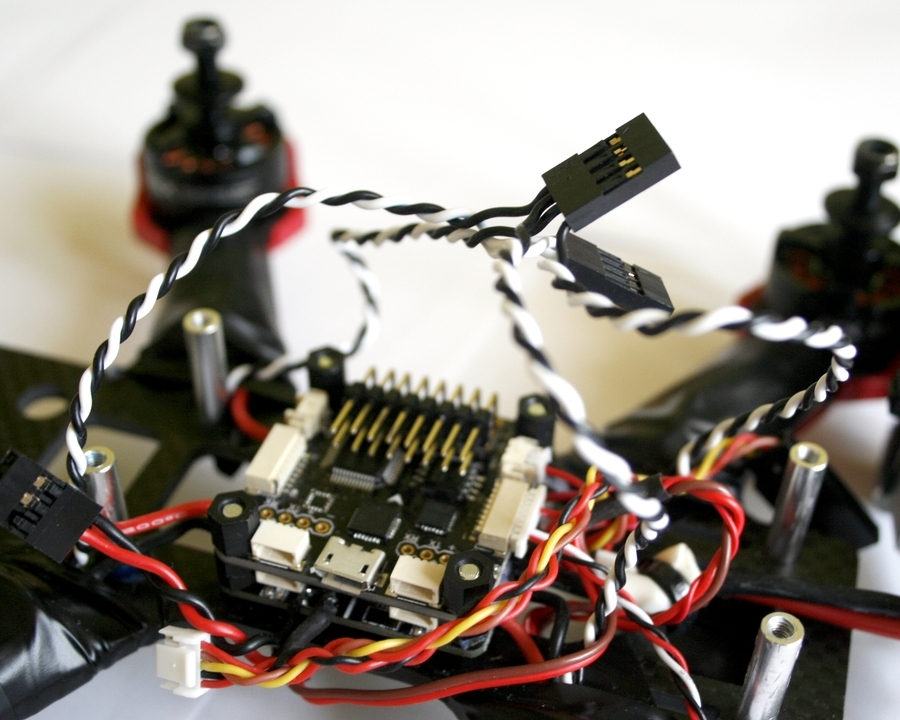
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
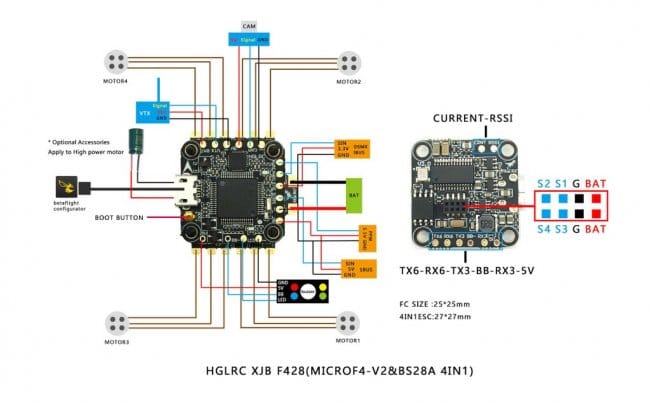
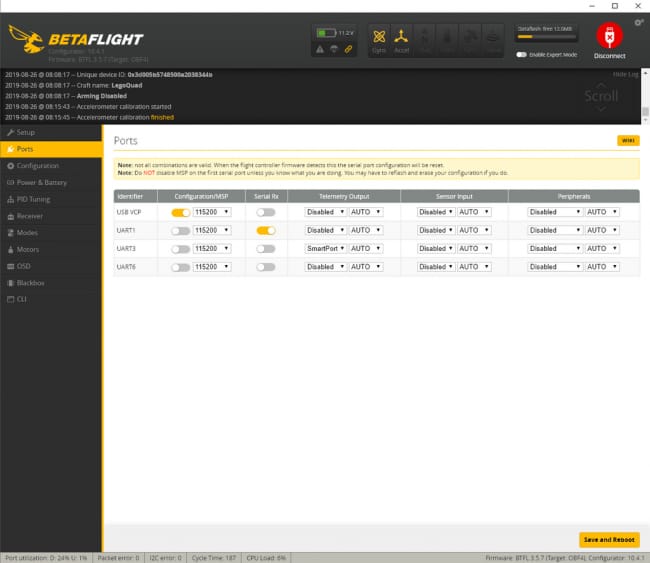
Схема проводки
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.

Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
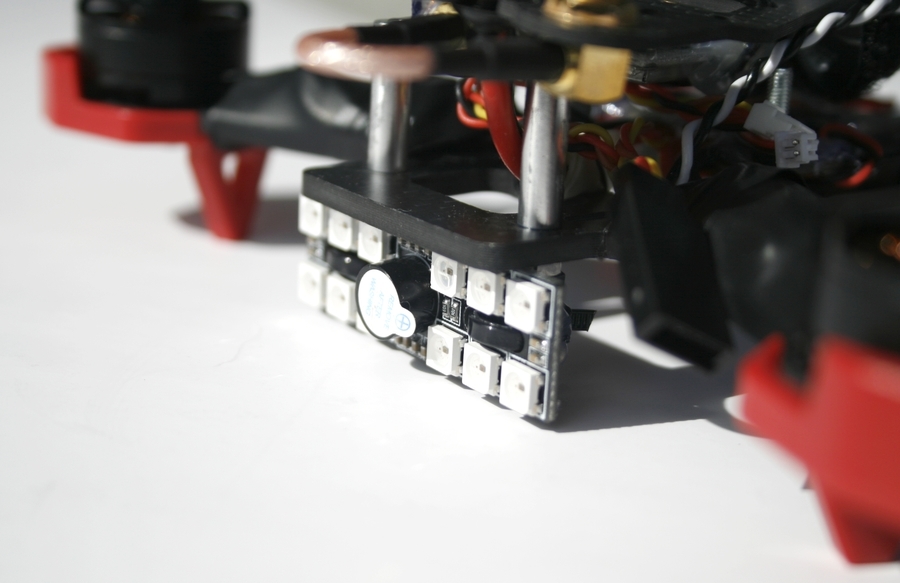
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
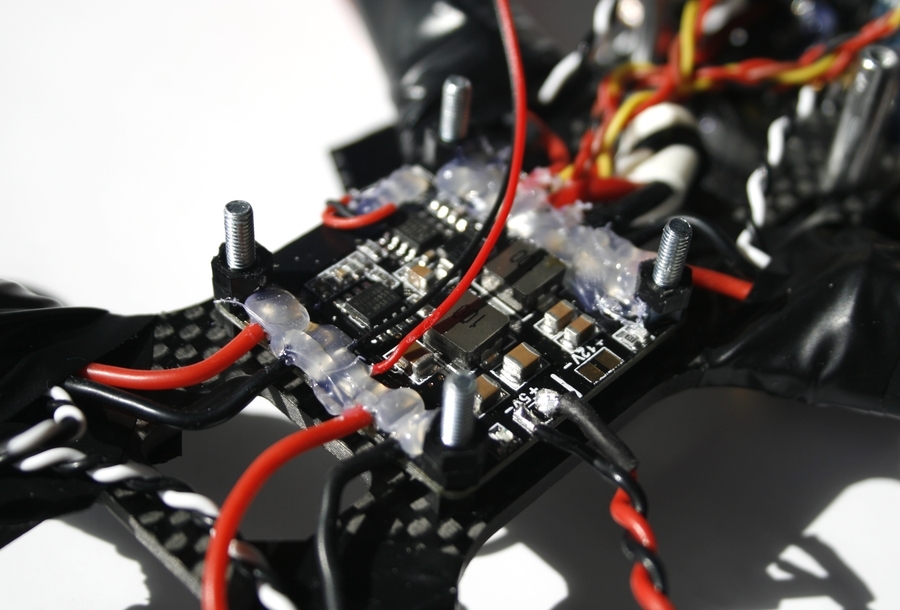
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
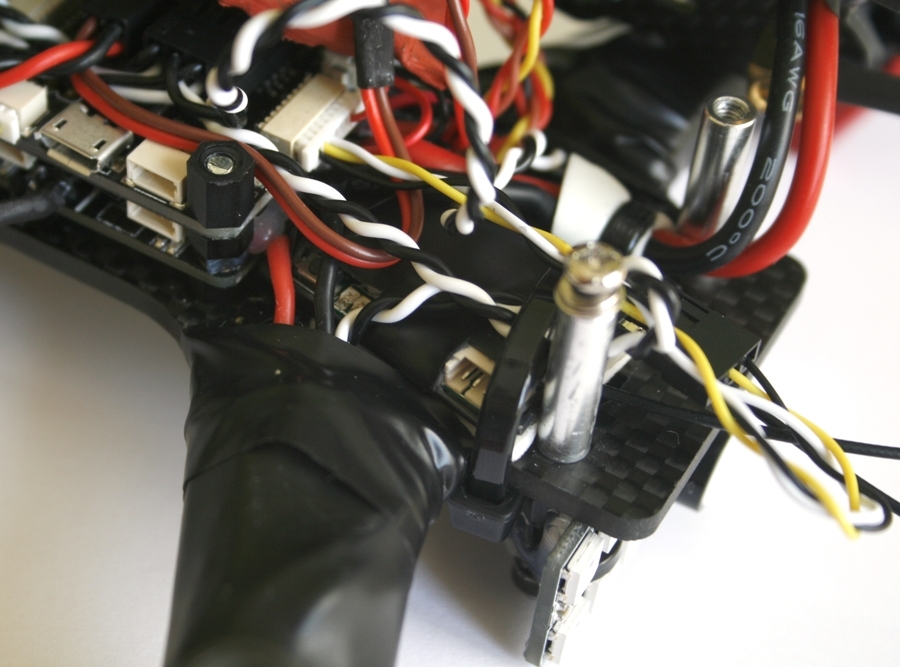
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
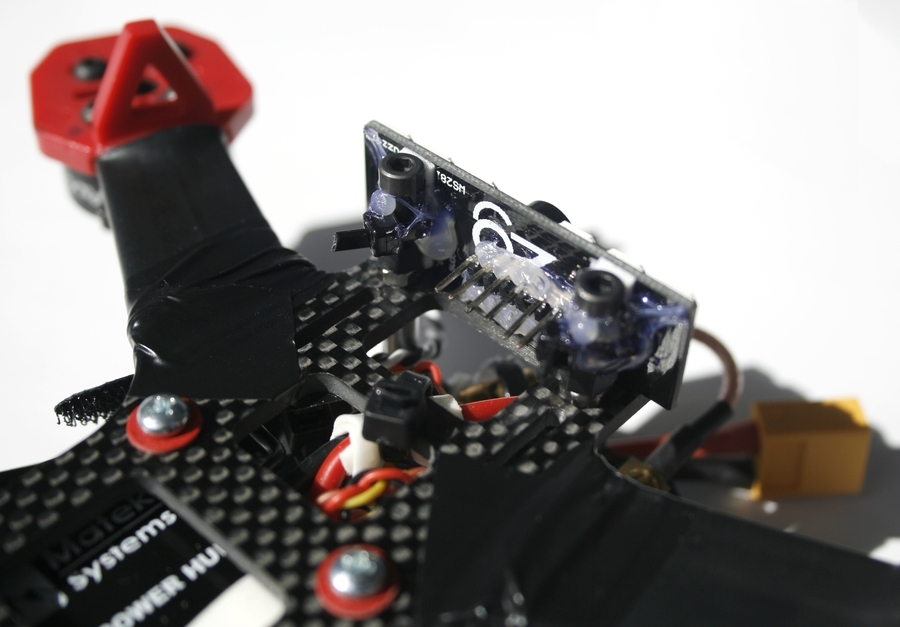
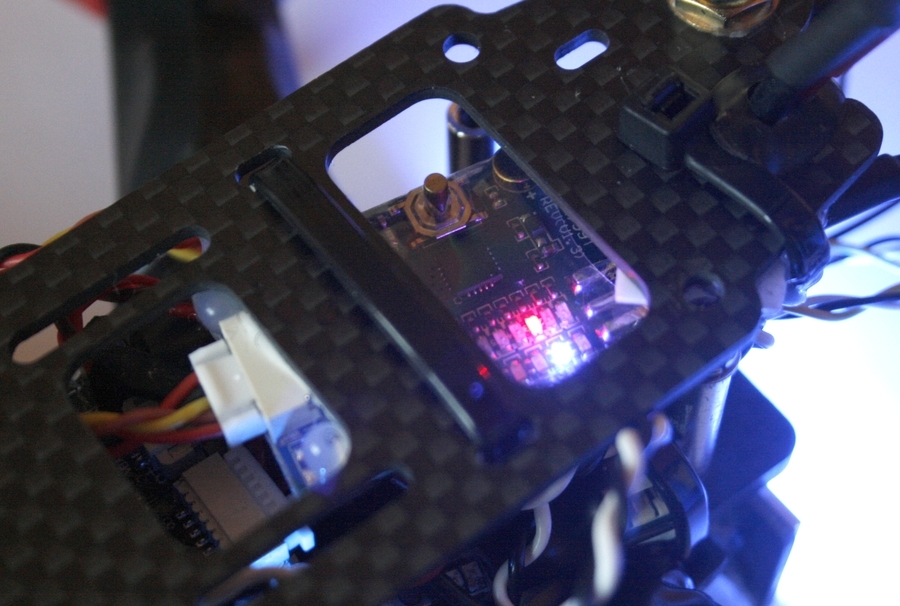
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.

Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.

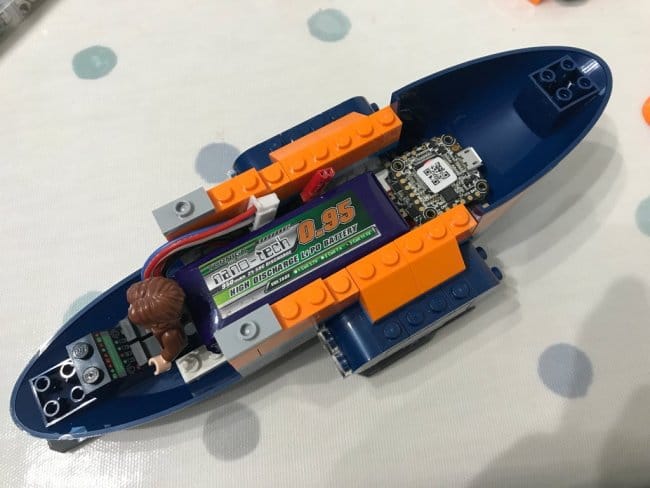
Из конструктора Лего можно сделать идеально симметричную раму для квадрокоптера.
Искал повод чтобы поиграть с конструктором снова? Вот тебе веская причина :)
Такой дрон дешев, и не требует специальных инструментов как например в этой инструкции (рекомендую взглянуть для сравнения и на нее тоже).
Я использовал набор Лего Техник, потому что у него есть отверстия в "кирпичиках" конструктора.
Мотор и летный контроллер я взял от популярного дрона Hubsan X4 (не нужно покупать дрон целиком, только запчасти).
Достань свой конструктор, смахни с него пыль и вперед!
Шаг 1: Инструменты и материалы
1. Лего
2. Паяльник
3. Пластиковые фиксаторы
1. Полетный контроллер Hubsan 107l или 107c (берите 107l если планируете установить на дрон LED лампочки, 107c если хотите установить камеру)
2. 4 двигателя (типа hollow cup) на 7мм.
3. 4 винта (и если хотите, возьмите один два про запас)
4. Аккумулятор на 3.7 вольта + зарядное устройство.
5. Пульт управления Hubsan
Пульт стоит не мало, если у вас его нет, то возможно выгоднее будет купить старый дрон rtf hubsan x4 и разобрать его на части.
Кстати, если вы совсем новичок, не знаете с чего начать, и этой инструкции вам будет не достаточно, вы можете просмотреть 3 абсолютно бесплатных видео курса , на которых вместе с преподавателем вы сможете собрать и запрограммировать своих первых роботов на Arduino и Raspberry. Дерзайте!
Шаг 2: Паяем полетный контроллер
Нужно будет поработать немного паяльником, но ничего сверх сложного в этом нет. Если вы посмотрите на полетный контроллер, то увидите что места, куда нужно припаять проводку от моторов уже отмечены.
И возможно вы уже знаете, что у квадрокоптеров два мотора двигаются по часовой стрелке, а два против. Очень важно чтобы моторчик, который двигается по часовой стрелке был установлен напротив другого такого же. То же самое касается и моторчиков, которые двигаются в обратном направлении.
На контроллере уже есть немного паяльного олова, но этого может не хватить, так что используйте свое если посчитаете нужным.
Шаг 3: Делаем раму для дрона из Лего

Картинки говорят сами за себя. Не обязательно делать именно такую раму, как сделал я. Включите воображение, и у вас получится что то намного покруче! Главное - не делать раму слишком тяжелой.
Шаг 4: Крепим моторы и контроллер

Я уже упомянул ранее что Лето Техник - идеален для этого проекта, потому что внутри элементов есть отверстия. К ним можно прицепить моторы на пластиковые фиксаторы.
Я также использовал двусторонний скотч, для дополнительного крепления, но он не обязателен.
Закрепите полетный контроллер сверху дрона, а аккумулятор под рамой, и вы готовы к отлету!
Шаг 5: Бесплатный видео курс
Если вы хотите научится программировать роботов, дронов, и контроллеры Arduino, но не знаете с чего начать, и забыли школьный курс физики, рекомендуем пройти бесплатные видео курсы.
В серии курсов вы научитесь собирать простых роботов, познакомитесь и научитесь программировать их при помощи микроконтроллеров Arduino и Raspberry.

 | Алексей Тереньтев автор инструкции |
| Иногда что-то делаю сам, но чаще что-то перевожу. | |


Денис Суслов Думаю он много не потянет, скорее всего только мини камеру, которые обычно используются как скрытые и весят 15-20 грамм.

Евгений Чимнев А можно вместо деталей от Hubsan X4 использовать детали от Cheerson CX-10? Cheerson дешевле будет!
Денис Суслов Cheerson CX-10 Mini ты видимо имеешь ввиду. Он меньше в размерах и дешевле, и моторы у него меньше, значит раму нужно будет делать еще более легкой, либо крепить более мощные моторы, но не уверен что это сработает. Хотя, учитывая его цену в 15$ можно попробовать.

Василий Сосновский Читаю, но мало чего понимаю :( А собрать хочется! Может есть какой то материал по общей концепции квадрокоптеров, какие основные части и т.п? Чтобы собрать хотя бы минимальную версию.
Денис Суслов Просто пройдись по инструкции еще раз выполняя шаг за шагом, думаю справишься, а если нет, напиши по каким именно шагам есть вопросы!Вообще концепция квадрокоптеров довольна простая на самом деле: контроллер, батарейки, моторы и винты. Контроллер - это мозг. В нем есть гироскоп и акселерометр, rf приемник и он крутит моторы. Конфигурировать ничего не требуется, при включении коптер сам настраивает себя, сам себя калибрирует, но важно чтобы поверхность на которой он стоит была ровной, точно горизонтальной, иначе исходные показатели о горизонте у него будут не точными.

Николай Мамадаев У меня есть коптер FQ777-124 и мне вот хочется его в другой корпус поместить. Может быть на 3D принтере его распечатать.

Игорь Мотовилов А чем текущий корпус не устраивает? Просто это вроде как карманная модель, из лего конечно корпус к такой сделать скорее всего не выйдет, по аэродинамическим показателям как минимум, а на 3D можно напечатать, да.

Как известно, технически сложные игрушки стоят довольно дорого, и не каждый может их купить. К примеру, Лего квадрокоптер, о котором мечтают многие дети, вполне можно сделать самостоятельно. Для этого не обязательно быть специалистом, достаточно хоть немного разбираться в технике.
В наше время выпускается огромное количество разнообразных игрушек для всех возрастов. Но самые интересные варианты, как и раньше, делаются только своими руками. В современном мире с его возможностями и игрушки получаются более технически мощными и продвинутыми. Если ребенок, подросток либо взрослый человек знаком с техникой и обладает даже минимальными навыками в работе с различными агрегатами и конструкциями, то у него есть возможность создавать интереснейшие вещи. Такие либо стоят в магазинах очень дорого, либо их и вовсе невозможно приобрести.

Одной из желанных, но очень дорогих игрушек, является квадрокоптер. В последнее время подобные устройства пользуются огромной популярностью у людей разных возрастов. Но стоит такая вещь дорого. Да и нет гарантии, что купленный продукт будет работать так, как ожидается. Поэтому многие стараются самостоятельно собирать дроны. В этом нет ничего особо сложного, если у мастера имеются некоторые технические навыки. Но часто проблема заключается в том, чтобы найти подходящую раму для объекта. И тут на помощь может прийти старый добрый Лего. Эти минифигуры дают возможность изготовить не только прочную, но и правильную рамку, с которой квадрокоптер будет летать так, как положено.
Существует огромное количество вариантов конструкторов. Это может быть и оригинальный европейский Лего, и его аналоги, сделанные в Китае. Качество элементов, как правило, не особо отличается. Главную функцию кубики выполнять будут в любом случае, поэтому разницы нет никакой.
Инструменты для изготовления дрона из конструктора
Для того чтобы разработать действительно надежный и правильно функционирующий квадрокоптер, понадобится немало элементов от Лего либо его аналогов, пластиковые фиксаторы и инструмент для спайки деталей. Это необходимо для того, чтобы собрать непосредственно каркас.

Кроме того, нужны детали для создания самого летающего аппарата. Для этого понадобится полетный контроллер, 4 двигателя на 7 мм, 4 винта для крепления м мощная аккумуляторная батарея. Кроме того, стоит сразу продумать вопрос пополнения энергии. Для этого можно использовать стандартное зарядное устройство. Чтобы летательный аппарат поднимался в воздух, летал и приземлялся по желанию человека, нужен пульт управления.
Стоимость этих элементов будет достаточно высокой, если выбрать качественные материалы. Поэтому некоторые мастера идут более простым путем. Они просто приобретают старые дроны, которые продают на запчасти практически за бесценок, а после используют их для создания новой конструкции на основе рамки из Лего.
Работа над полетным контроллером
Для выполнения данной задачи нужны некоторые особенные навыки. Речь идет об умении управляться с паяльником. Он понадобится для того, чтобы соединить полетный контроллер с моторами. Чаще всего на запчастях уже имеются отметки, по которым можно определить, что и с чем нужно соединять.

Мастера, которые уже знакомы с техническими характеристиками квадрокоптеров, знают о том, что тут необходимо 4 моторчика, из которых 2 будут двигать лопасти по часовой стрелке, а еще 2 — против. Один элемент в обязательном порядке устанавливают напротив второго аналогичного.
Припаять все детали нужно максимально качественно. Как правило, на контроллере уже имеется определенное количество паяльного олова, но его не всегда оказывается достаточно, поэтому приходится добавлять из своих запасов.
После того как моторчики будут в правильном порядке соединены с контроллером, можно переходить к следующему шагу. Но для начала стоит провести тесты и проверку качества, чтобы в полете у аппарата ничего не отвалилось.
Изготовление рамы
Это уже более простая и в каком-то смысле даже творческая работа. Из элементов конструктора можно изготовить любой вариант рамы. Главное, чтобы он был с 4 конечностями абсолютно равной длины для соблюдения баланса. Стоит заметить, что для летательного аппарата очень большую роль играет вес. Поэтому не стоит перегружать квадрокоптер лишними деталями, которые не будут выполнять техническую роль, а станут лишь украшением.

Самый простой вариант — это сделать из элементов конструктора крестообразную рамку. Стоит заметить, что квадрокоптер может быть изготовлен не только из стандартных элементов конструктора Лего, но и из деталей от набора Лего-техник. Они отличаются тем, что внутри блоков имеются отверстия. Через них будет в дальнейшем очень удобно крепить моторы. Но такой вариант не является обязательным. Из обычных элементов выходит не менее качественная и удобная рамка для дрона.
Окончательная сборка
В завершении всей работы нужно соединить детали между собой. Если для создания рамки был использован Лего-техник либо иной похожий конструктор, то сложностей не будет никаких. Тут можно использовать пластиковые фиксаторы, при помощи которых элементы двигателя и контроллер с аккумулятором будут надежно закреплены. В случае когда для работы были взяты обычные блоки, в них придется проделать отверстия, а после закрепить все на пластиковые фиксаторы. Полетный контроллер крепится с верхней части рамы, а аккумуляторная батарея будет расположена внизу.

Для большей надежности стоит использовать двусторонний скотч. Он не даст элементам во время полета перемещаться либо съезжать на бок, что не скажется на управлении квадрокоптером.
Полезные советы
Все тщательно проверив, можно будет приступать к запуску. Первый полет стоит проводить на открытой местности. Это позволит более качественно проверить работу и расстояние действия пульта дистанционного управления и позволит избежать аварий. Будет очень неприятно, если из-за технических недочетов будет разрушена конструкция, на которую было потрачено столько времени и сил.
Для первых испытаний нужно выбрать наиболее подходящий день. Лучше, если это будет солнечная и спокойная погода. Никогда не стоит запускать квадрокоптер при дожде либо ветре. Кроме того, стоит первое время исключить полеты в людных местах. Это позволит избежать многих проблем. Использовать свой летательный аппарат там, где бывает много людей, можно только в том случае, если дроном управляет настоящий мастер с большим опытом. Иначе подобными устройствами возможно нанести травмы и испортить имущество, что повлечет за собой негативные последствия для владельца квадрокоптера, в том числе и немалые штрафы. Поэтому технику безопасности нужно соблюдать обязательно.
Читайте также: