
Как сделать манипулятор из лего ev3
Обновлено: 11.05.2024
Разработала: учитель математики МБОУ Болгуринская СОШ Малыгина С.И.
Цели: формирование профориентации у школьников в процессе конструирования и программирования роботов
1. Познакомить с конструктором Lego Mindstorms EV3 и средой программирования.
2. Собрать и запрограммировать робота на ПК.
3. Загрузка программы в робота
4. Демонстрация работы робота
Вид: практическая работа.
Оборудование: ноутбуки, наборы конструкторов Lego Mindstorms EV3, среда программирования Lego Mindstorms Education EV3, видео инструкция по сборке робота, инструкции по программированию робота, сборке ультразвукового датчика, подключения моторов и датчика к блоку.
Ход мастер-класса
Вводная часть
Само слово «робот» является существительным, обозначающим
неодушевленный предмет. Но роботы очаровательны. Идея неживой материи, которая самостоятельно выполняет сложные задания, просто поразительна! С тех пор как роботы стали такими технологически сложными и современными, можно было бы подумать, что для их конструирования и программирования необходимы большие знания и навыки. Однако серия конструкторов Lego Mindstorms EV3 делает робототехнику легкой и увлекательной как для взрослых, так и для детей. Эти наборы открывают робототехнику для всех возрастов. Это образовательная версия роботов.
Образовательная робототехника объединяет классические подходы к изучению основ техники и современные направления: информационное моделирование, программирование, информационно- коммуникационные технологии. Лего-конструирование знакомит с системой управления роботами: аппаратной частью, простым, но мощным программированием Лего-моделей. В настоящее время такая наука как робототехника приобретает все большее значение, опираясь на информатику, математику, физику, биологию и другие фундаментальные науки.
В состав набора LEGO Mindstorms EV3 входит 541 деталь.
Детали образуют 5 больших групп:
1. Электронные компоненты:
- EV3 микрокомпьютер с батарейным блоком.
-Датчики (ультразвуковой датчик, датчик касания, датчик цвета/ освещенности, гироскопический датчик).
- Сервоприводы (моторы ) и соединительные кабели.
2. Шестеренки, колеса и оси.
3. Соединительные элементы.
4. Конструкционные элементы.
5. Детали для украшения.
Основная часть.
Сегодня мы с вами создадим простейшего робота "Пятиминутку" на основе конструктора Lego Mindstorms EV 3 и запрограммируем его. Это робот-тележка, его мы будем собирать с помощью приложения 1. В видео-ресурсе нет описания сборки ультразвукового датчика и подключения моторов и датчику к блоку с помощью кабелей. Поэтому датчик будем собирать, используя приложение 2. Подключать моторы и датчик будем с помощью приложения 3.Для этого нам понадобятся соединительные кабели: 3 по 25см.
Программирование в стандартной среде программирования Lego Mindstorms EV3 представляет собой перетаскивание блоков с определенными действиями. Задавая параметры для датчиков, подстраиваем робота к выполнению определенных действий.
Робот, которого мы сегодня создадим, довольно простой, чтобы сделать что-то серьезное необходимо гораздо больше времени.
Наш робот будет выполнять всего четыре действия:
1. Движение вперед
2.Остановка, когда доедет до препятствия
3.Говорит « Stop » (используя звуковые файлы)
4.Движение назад (3 оборота)
Практическая работа
Вам предстоит сконструировать по видео инструкции робота и запрограммировать его. Открываем видео, собираем робота. Далее собираем ультразвуковой датчик (приложение 2). Ну и осталось подключить датчики и моторы к блоку EV3 (приложение 3). Используя приложение 4, составим программу движения робота.
Заключительная часть
На данном мастер-классе вы познакомились с конструктором Lego Mindstorms EV3 и средой программирования. С овременный мир уже невозможно представить себе без применения высоких технологий и роботов. Занятия по робототехнике помогают идти в ногу со стремительно развивающимся прогрессом и дают уникальную возможность для участия в улучшении качества жизни. Благодарность всем участникам мастер – класса.
Предлагаю выразить свое мнение, обсудить полученные результаты.
(Оценивают, что получилось успешно, что вызвало наибольшее затруднения)
Какие трудности у меня были…
Было особенно интересно …
Использованные источники
1.Овсяницкая Л.Ю. Курс программирования робота Lego Mindstorms EV3 в среде EV3 / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий. – М: Издательство «Перо», 2016. – 300 с.
2. С. А. Филиппов Робототехника для детей и родителей. Санкт-Петербург «Наука» , 2013
Приложение 1
Приложение 2
Сборка ультразвукового датчика
Приложение 3
Подключение сервомоторов, ультразвукового датчика к блоку EV3 с помощью кабелей. Возьмем два соединительных кабеля длиной 25 см, левый мотор подключим к порту B , а правый - к порту C . Именно это подключение выбрано по умолчанию в блоке "Рулевое управление". Ультразвуковой датчик подключим к порту 4.
Приложение 4
Инструкция по составлению и выполнению программы
1.Открыть на ноутбуке программу LEGO MINDSTORMS Education EV3.
2.Создать новый проект (значок+).
3. Составить программу:
1. Движение вперед
2.Остановка, когда доедет до препятствия
3.Говорит « Stop » (используя звуковые файлы в папке «Информация»)

4.Движение назад (3 оборота)
4.Соединить робота с ноутбуком с помощью кабеля.
5. Включить микрокомпьютер на роботе, удерживая центральную кнопку (загорится зеленый цвет).
6. Загрузить программу в робота.
7. Отсоединить кабель от робота.
8. Запустить робота на выполнение программы. Выбрать папку «Project», файл «Program» , нажать на центральную кнопку микрокомпьютера.
Разработайте, соберите и запрограммируйте роботизированную систему, которая могла бы захватывать и переставлять предметы.

План урока
Подготовка
— Ознакомьтесь с материалами для учителя.
— Если необходимо, разработайте план урока, используя материалы для начала работы из ПО «Лаборатория EV3» или Приложения для программирования EV3. Это поможет познакомить учащихся с конструкторами LEGO ® MINDSTORMS ® Education EV3.
Объяснение (30 мин.)
— Дайте учащимся задание придумать несколько прототипов.
— Предложите им найти новые конструкторские и программные решения.
— Попросите каждую пару учащихся собрать и испытать два решения.
— Раздайте учащимся большие листы клетчатой бумаги, цветные карандаши или маркеры.
Объяснение (60 мин.)
— Попросите учащихся протестировать свои решения и выбрать лучшее из них.
— Убедитесь, что они могут подготовить свои таблицы результатов испытаний.
— Дайте каждой команде немного времени, чтобы завершить свой проект; затем соберите материалы, в которых они зафиксировали результаты своей работы.
Дополнение (60 мин.)
— Дайте учащимся немного времени, чтобы подготовить итоговые отчёты.
— Проведите обсуждение, в ходе которого каждая группа расскажет о результатах своей работы.
Оценка
— Дайте оценку работе каждого учащегося.
— Для упрощения этой задачи вы можете использовать раздел оценки.
Начало обсуждения
Манипуляторы — один из видов промышленных роботов, которые могут перемещать предметы с одного заданного места на другое. Для более точного и безопасного захвата и установки предметов различной формы, веса и уровня хрупкости можно использовать разные виды захватов.

PLAY
Поощряйте активное обсуждение идей.
Предложите учащимся ответить на следующие вопросы.
- Что представляют собой манипуляторы и где они используются?
- Какой приводной механизм можно использовать, чтобы поднять предмет?
- Как робот может переместить предмет?
- Каким образом робот может осторожно и точно переместить предмет?
Попросите учащихся задокументировать свои первоначальные идеи и объяснить, почему они выбрали то или иное решение для создания своего первого прототипа. Попросите их описать, каким образом они будут оценивать свои идеи в процессе выполнения данного проекта. В процессе рассмотрения и повторения учащиеся получат определённую информацию, которую смогут использовать для оценки эффективности своих решений.
Дополнительно
Развитие языковых навыков
Для развития языковых навыков попросите учащихся:
- использовать свои записи, наброски и/или фотографии, чтобы подвести итоги этапа разработки и подготовить итоговый отчёт;
- снять видео, в котором рассказывалось бы о процессе разработки их решения, начиная с первоначальных идей и заканчивая финальным этапом реализации проекта;
- подготовить презентацию, рассказывающую об их программе;
- подготовить презентацию, рассказывающую об их решении и аналогичных системах, используемых в реальной жизни, а также описывающую новые изобретения, которые можно создать на основе их решения.
Вариант 2
Для развития языковых навыков попросите учащихся:
Исследуйте различные механизмы, использующиеся для производства лекарственных препаратов и вакцин, и затем подготовьте рассказ о работе в автоматизированной фармацевтический лаборатории, сделав акцент на преимуществах и недостатках автоматизации процесса приготовления лекарств.
Обсудите вопросы обеспечения безопасности данных и защиты авторских прав на формулы лекарств, способных принести владельцам миллиардные прибыли и хранящихся в онлайн-системах, в том числе:
возможные последствия утери формул лекарств;
преимущества хранения конфиденциальной информации в онлайн-системах.
Развитие математических навыков
На этом уроке учащиеся собрали робота-манипулятора. Оценка и улучшение производительности крайне важны для любых автоматизированных систем. Машинное обучение — процесс, при помощи которого роботы-манипуляторы оценивают собственную производительность и вносят в производственные процессы изменения, необходимые для ее улучшения.
Для развития математических навыков и изучения машинного обучения попросите учащихся:
- дать определения терминов точности и аккуратности и применить их в своих робототехнических проектах;
- определить переменные, по которым можно оценить точность и аккуратность разработанных учащимися систем (например, скорость робота может влиять на аккуратность, точность или на обе эти характеристики);
- подготовить и провести мини-эксперимент, чтобы определить, влияют ли выбранные переменные на аккуратность, точность или на обе эти характеристики.
Советы по сборке
Идеи для вдохновения
Дайте учащимся возможность собрать несколько моделей, инструкции для которых можно найти по следующим ссылкам. Предложите им изучить работу этих систем и на их основе подготовить Техническое задание.
Советы по тестированию
Предложите учащимся сконструировать собственную испытательную установку и разработать порядок испытаний, который позволил бы выбрать наилучшее решение. Следующие советы помогут учащимся провести испытания.
- Отметьте положение карандаша/маркера, установленного в механизме, на клетчатой бумаге. Это позволит возвращать его в то же положение каждый раз при проведении нового испытания.
- Используйте квадраты 1 x 1 см на клетчатой бумаге, чтобы записывать результаты каждого испытания.
- Используйте цветные карандаши или маркеры, чтобы отметить ожидаемое и фактическое положение перемещённого роботом предмета.
- Подготовьте таблицы результатов испытаний, чтобы записывать в них результаты своих наблюдений.
- Оцените точность работы своего робота, сравнив ожидаемые и фактические результаты.
- Проведите испытания по меньшей мере три раза.
Пример решения
Далее приведён пример решения, соответствующего критериям Технического задания.


PLAY
Советы по программированию
Пример программы, созданной в EV3 MicroPython
Перспективы профессионального развития
Учащиеся, которым было интересно данное задание, могут попробовать себя в следующих сферах деятельности:
- информационные технологии (программирование);
- производство и инженерное дело (машиностроение).
Возможности для оценки
Журнал педагога
Разработайте критерии оценки, максимально соответствующие вашим задачам, например следующие.
1. Задание выполнено не полностью.
2. Задание выполнено полностью.
3. Результаты превзошли ожидания.
Используйте следующие критерии для оценки успеваемости учащихся.
- Учащиеся могут оценить различные варианты решений на основе выбранных критериев и компромиссов между ними.
- Учащиеся самостоятельно разрабатывают работающие и креативные решения.
- Учащиеся могут понятно рассказать о своих идеях.
Самостоятельная оценка
Когда учащиеся получат первые сведения об эффективности моделей, дайте им время, чтобы оценить свои решения. Вы можете задать следующие вопросы.
- Ваше решение соответствует критериям технического задания?
- Можно ли сделать движения вашего робота более точными?
- Какие способы решения этой задачи нашли другие команды?
Попросите учащихся придумать и задокументировать два варианта усовершенствования их решений.
Оценка одноклассников
Организуйте процесс оценки решения одноклассниками, в ходе которого каждая группа должна оценить свой собственный проект и проекты других групп. Это поможет развивать навыки высказывания конструктивного мнения, а также совершенствовать навыки анализа и умение использовать объективные данные для аргументации своей позиции.
Занимаясь на спецкурсе «Конструирование» мне приходилось собирать разные модели из конструктора Лего, но модель манипулятора я не собирал. За последнее время появилось много видеороликов про такие устройства, можно увидеть, как они устроены и как работают. Но всегда интереснее увидеть работу такого устройства вживую, поэтому я решил собрать эту модель.
Актуальность темы.
На уроках технологии в 7 классе при изучении технологических систем рассматривают разные механизмы и электротехнические устройства, в том числе на примере манипулятора. Этот материал подробно изложен в учебниках, при выполнении заданий учащиеся пользуются теоретической информацией. Если построить модель манипулятора, то урок будет проходить интереснее и более наглядно.
Постановка проблемы.
Хотелось, чтобы для проведения уроков технологии по изучению механизмов и электротехнических устройств в технологических системах использовалась рабочая модель манипулятора, но в настоящее время такой модели нет.
Цель проекта.
Разработать и построить действующую модель манипулятора в форме руки из конструктора Лего на основе микропроцессора EV–3.
План работы над проектом.
- Проанализировать существующие решения.
- Составить техническое задание на проектирование.
- Разработать и описать конструкцию манипулятора.
- Написать программу управления конструкцией.
- Протестировать модель.
- Оценить получившиеся результаты.
I. Исследование по проблеме.
1.1 Анализ существующих решений.
Манипулятор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века , благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека лучи. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Сейчас манипуляторы используют в разных производствах.


Рисунок 1. Манипулятор в металлургии
Кран-манипулятор — кран стрелового типа, установленный на автомобильном шасси и служащий для его загрузки и разгрузки одиночными и сыпучими грузами в контейнерах и их транспортировки.

Рисунок 2. Передвижной кран-манипулятор
Для людей с ампутированной конечностью существует Бионический протез.
Bebionic —биоэлектрическая искусственная кисть с приводом электромеханическим и микропроцессорным контролем, созданная для восстановления функции ампутированной конечности.

Рисунок 3. Бионический протез
Принцип действия бионического протеза:
После травмы или в ходе болезни конечность ампутируют. Оставшаяся культя состоит из множества тканей: кожи, мышц, костей, сосудов и нервов. Хирург во время операции выводит сохранившийся двигательный нерв на остающуюся крупную мышцу. После заживления операционной раны нерв может передавать двигательный сигнал. Этот сигнал воспринимает датчик, установленный на протезе. В процессе восприятия нервного импульса участвует сложная компьютерная программа.
Минусы такого протеза:
У такого протеза единственный минус. Это его стоимость.Стоимость бионического протезирования пока высока и может достигать в сложных случаях миллионов рублей. Однако возврат к полноценной жизни трудно оценить в материальном исчислении. По сути, установка бионических протезов – единственная возможность для инвалида вернуться к нормальной жизни: строить и осуществлять планы, содержать семью, добиваться карьерных вершин.
NiryoOne – это 6-осевой манипулятор, созданный специально для производителей, системы обучения и небольших компаний. Согласно Niryo, имеющий шесть осей перемещения манипулятор позволяет выполнять задачи, которые до сих пор были доступны исключительно промышленным роботам. Манипулятор может выбрать и положить на место предметы с помощью вакуумного насоса, захвата или электромагнита. Он поможет автоматизировать 3D-принтер, позволит сверлить отверстия в изделиях. Он может выполнять необходимые домашние работы и даже творчески развлекать детей.

Рисунок 4. Манипулятор серии NiryoOne
Минусом такого манипулятора является его большая стоимость, его можно приобрести за сумму 20000 – 200000 долларов.
1.2 Техническое задание на проектирование.
Проведя анализ существующих манипуляторов, делаем вывод, что форма устройства напоминает руку человека, движения осуществляются с помощью механизмов, таких как рычаг, зубчатые передачи.
Необходимо спроектировать и собрать механическую руку из конструктора ЛЕГО. Манипулятор должен захватывать предметы и перемещать их в нужное место. Для обеспечения автоматической работы устройства необходимо программное обеспечение.
II. Практическое решение проблемы.
2.1 Разработка и описание конструкции манипулятора.
1 ) Для создания самой руки требуется основание, которое могло бы удержать эту руку. После сборки основания на него нужно установить Миникомпьютер Lego MINDSTORMS EV3 и Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом, которые приводили бы в движение руку, а также датчик касания, при нажатии на который рука бы останавливалась в нужном месте.

2) После сборки основания создаем саму руку. Для того, чтобы рука могла подниматься или опускаться, ставим на конструкцию руки Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом и датчиком цвета, для того чтобы рука поднималось на определенную высоту.

3) После сборки конструкции руки нужно собрать захватывающий механизм из Среднего Сервомотора Lego MINDSTORMS EV3, с зубчатым механизмом выполняющий роль пальцев.




4 ) После сборки захватывающего механизма устанавливаем его на конструкцию руки и подключаем все сервомоторы и датчики к Миникомпьютеру.

2.2 Разработка и описание ПО.
Прежде чем приступать к составлению компьютерной программы, необходимо составить логическую последовательность действий манипулятора.
Сомкнуть захват, захватив предмет.
Повернуть манипулятор на определенный угол.
Повернуть манипулятор в исходное положение.
Повторить программу необходимое число раз.
В системе ПО записывается подпрограмма для калибровки и синхронизации моторов:

Затем записываем основную программу. Для этого мы должны в программе запрограммировать две кнопки, при нажатии одной из них рука повернулась в определенную сторону, в зависимости от того, где находится предмет:

Потом мы должны запрограммировать средний и большой сервомотор, находящиеся на конструкции руки для того, чтобы рука опустилась с помощью большого сервомотора и захватила предмет с помощью среднего сервомотора:

После того, как рука захватила предмет, мы записываем в программе для большого сервомотора на основании программу для возращения руки в то же положение, в котором она была изначальна. И для среднего, и большого сервомотора находящиеся на конструкции руки мы записываем программу для того, чтобы рука опустилась и отпустила предмет:

1.Оценка проекта.
Мне все же удалось достичь цели проектирования, потому что моя модель манипулятора соответствует техническому заданию на проектирование. Манипулятор выполняет следующие действия: захватывает предмет, осуществляет подъем предмета, затем поворачивается на заданный угол, опускает предмет и раскрывает захват, долее поднимается и возвращается в исходное положение. Работа манипулятора выполняется по заданной программе.
Полученная модель будет являться хорошим наглядным пособием для уроков технологии в 7 классе при изучении механизмов и электротехнических устройств в технологических систем.
Работая над этим проектом, мне потребовались такие умения, как: находить и обрабатывать информацию, читать схемы, чертежи, моделировать и конструировать устройства из конструктора Лего, составлять компьютерную программу, используя язык объектно-ориентированного программирования, работать с текстовым редактором, создавать презентацию в приложении Power point.
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Самый умный искусственный интеллект

Марк Цукерберг и Элон Маск инвестируют в разработку искусственного интеллекта
По словам одного из основателей Vicarious Скотта Феникса (Scott Phoenix), создание искусственного неокортекса приведёт к появлению компьютеров, способных мыслить и рассуж.
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 - инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора - образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании "Компас". Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования "Шорт трек" категории "Hello, robot!". Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

Конструктор ЛЕГО находка для любого юного избретателя. Можно сборать что угодно. Вот, например, умельцы собирают роботизированные руки из разных наборов. Читайте статью и смотрите видео. Вот молодцы!
Роботизированная рука из набора LEGO EV3
Как Вы видите рука построена на базе 3-х контроллерах EV3. Мы нашли программу, которую можно загрузить в блок lego mindstorms для запуска в действие этого огромного роботизированного устройства:
Роботизированная рука, сделанная из самых современных материалов методом 3D-печати, вызывает восхищение сконструировавшими её учёными. А вот аналогичная рука, основой для которой послужил конструктор LEGO, больше ориентирована на развлекательную и юмористическую составляющие, хотя и способна выполнять базовый набор действий и движений.
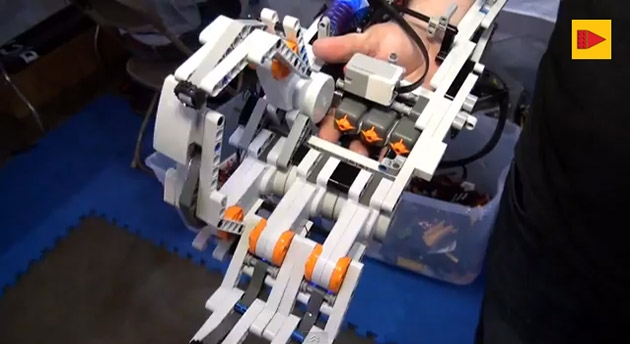
Автором необычного творения, состоящего из деталей конструктора, стал Диаво Вольтажио (Diavo Voltaggio). Правда, в качестве материала им были использованы не части из LEGO-игрушек, которые можно приобрести в «Детском мире», а фирменный набор для инженеров-энтузиастов под названием LEGO Mindstorms EV3. Такие наборы весьма популярны у любителей создавать простые роботизированные механизмы собственными силами.
Автор назвал своё детище киборг-конечностью «Mark VI». Индекс в наименовании был выбран не случайно. По счёту это уже шестая модель роботизированной руки, которую господин Вольтажио изготовил за последний год. Логично предположить, что именно проект Mark VI является самым совершенным с технической точки зрения — более крепким и надёжным, чем прежние искусственные LEGO-руки, но, в то же время, гораздо тяжелее из-за большей массы аккумулятора и дополнительных приспособлений привода.
Конструкция созданного манипулятора отличается простотой и надёжностью. Здесь имеется всего четыре кнопки, каждая из которых запускает один из четырёх моторов, управляющих роботизированными пальцами. Контроль за механической рукой происходит следующим образом: при нажатии на кнопку отправляется команда на сгиб соответствующего пальца, а как только кнопка отпускается — палец тут же возвращается в исходное положение.
Труд Диаво Вольтажио не остался без внимания, и автор удостоился первого места за своё изобретение, продемонстрированное на выставке BrickFair LEGO Convention. В ближайшее время автор роботизированной руки приступит к проектированию седьмой версии устройства.
Роботизированную руку сделали из Lego technics
Конструктор Lego долгое время считался детской игрушкой. Однако один из пользователей YouTube доказал, что из элементов Lego можно изготавливать довольно сложные механизмы, например, руку для робота. Созданная роботизированная рука может делать те же движения, что и человеческая, но с гораздо меньшей скоростью.
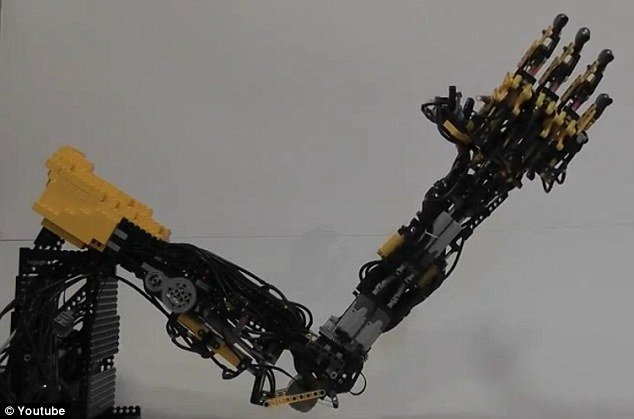
Пальцы руки могут сгибаться независимо друг от друга, а кисть вращаться благодаря пневматике Lego. Рука способна захватывать предметы, правда, их вес не должен превышать несколько сотен граммов. Конечность также имеет функциональный локтевой сустав. Все движения руки управляются при помощи джойстиков, сообщает Daily Mail.
Правда о терминаторе » книги и рассказы
Читайте также: