
Как сделать мини марсоход из лего
Обновлено: 26.04.2024
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
проектно-исследовательских работ учащихся 1-11 классов
4б класс МКОУ «СОШ №2»
4б класс МКОУ «СОШ №2»
учитель начальных классов МКОУ «СОШ №2»
Введение
Запасы сырья на нашей планете при нынешнем уровне их добывания скоро могут совсем истощиться. Люди жгут в топках заводов и машин природные богатства. Уменьшаются запасы газа и нефти, леса и воды.
Изучение Марса в последние годы становится все более актуальным, ведь именно Марс может стать той планетой, которая поможет землянам восполнить запасы полезных ископаемых. Возможно, кто-нибудь из нас и станет первопроходцем, ступившим на эту удивительную планету. Поэтому данная тема является актуальной . Вот мы и решили узнать как можно больше о нашем ближайшем соседе во Вселенной.
Цель проекта : создать модель марсохода, способного вести исследования в поиске полезных ископаемых, используя конструктор ЛЕГО
Задачи проекта:
- выяснить, когда и кем был открыт Марс и почему он так назван;
- изучить основные характеристики планеты Марс;
- собрать марсоход из констуктора Лего
Гипотеза : на планете Марс могут быть полезные ископаемые.
Теоретическая часть. Изучаем сведения о планете Марс.

Сначала мы решили собрать теоретический материал о планете Марс: почему ее называют «красной планетой», может быть это как-то связано с полезными ископаемыми.
Вот что мы выяснили:
Оказывается Марс, как небесное тело, был известен астрономам тысячи лет. Но в глубокой древности, не имея специальных приборов, можно было только наблюдать на небосклоне ярко-оранжевую звезду, поэтому древние астрономы могли вести лишь простейшие наблюдения (например, как движется тело в течение года). Первым человеком, который увидел Марс в телескоп, был итальянский ученый Галилео Галилей. Произошло это в 1609 году.
Также мы узнали, что эта удивительная планета называлась по-разному, но в основе названия всегда была положена главная отличительная особенность – её красный цвет. Так, в Древнем Китае Марс называли «звезда огня». Многие древние люди названия небесных тел посвящали богам. Вавилонские астрономы планету называли Нергал, в честь бога войны и смерти. Древние египтяне дали название бога неба Гора. Древние греки подобрали название Арес – кровожадный бог войны. Нам было очень интересно узнать, что на Руси долго Марс именовали почти по-гречески – Аррисом или Арсеем. Современное название Марс пришло из Древнего Рима. Римляне заимствовали название у греков, но переделали его на свой лад. В римской мифологии богу войны Аресу соответствовал свой бог – Марс. Про Марс создано много сказок и легенд (см. Приложение)
Мы уже знали, что Марс — четвертая по счету планета, удаленная от Солнца и ближайшая к Земле. Этой планете приблизительно 4,6 миллиарда лет, как Земле, Венере и остальным планетам солнечной системы. У него есть два крошечных спутника, называемые Фобос и Деймос (Страх и Ужас).

При создании модели марсохода, нам необходимы более точные сведения об этой планете. И мы обратились к Википедии, чтобы познакомиться с научными данными, известными сегодня. Оказалось, что эта планета до обидного мала. В поперечнике Марс почти вдвое меньше Земли и в 10 раз её легче, а, значит, и сила притяжения меньше, чем земная. Полный оборот вокруг светила Марс делает за 637 земных суток или за один год и 11 месяцев. На Марсе, как и на Земле, происходит смена времен года, только тянутся они в два раза дольше, чем земные. И протекают значительно суровее, чем на Земле.
Летом на Марсе хозяйничают бури и вихри. Их продолжительность – от 50 до 100 суток. Скорость ветра достигает 100 м/с. В небе висит розовое зарево от поднятой с поверхности марсианской пыли. Воздух в летний период может прогреваться до + 20 градусов.
Зима на Красной планете суровая и холодная, температура может опускаться до – 125 градусов. Углекислый газ, содержащийся в атмосфере, переходит в твердое состояние и превращается в сухой лед, который ложится на поверхность ледяными шапками. Иногда зимой выпадает «сухой» снег, но снежинки испаряются, не достигнув поверхности. Может образовываться и небольшой иней.
А вот марсианский день мало отличается от земного: сутки там длятся 24 часа 37 земных минут. Сила притяжения на Марсе составляет всего 38% от Земного , поэтому если на Земле вы весите 100 кг, то на Марсе весы покажут 38 кг. Поверхность Марса очень похожа на земную. Здесь присутствуют разломы, ущелья с ветвящимися каньонами.
По своим параметрам марсианская почва близка к земной и на ней теоретически можно было бы выращивать растения.


Воздух на Марсе смертелен для человека. Размер его атмосферы всего лишь 1% от Земной. Он состоит из 95% двуокиси углерода, 3% азота, 1,6% аргона, и следовых количеств кислорода, водяного пара и других газов.
Марс это мир экстремальных погодных условий. В целом, там очень холодно, средняя температура поверхности около -47 °C. В течение лета, близ экватора, температура может достигать 20 °C в течение дня, но падать до -90 °С ночью. Это 110 ° градусов разницы температур создают ветра, которые достигают скорости торнадо. После того как начинаются эти ветры, в воздух поднимается пыль из оксида железа, которая охватывает всю планету.
Марс не имеет океанов, рек и озер, но космический аппарат НАСА Mars Odyssey, обнаружил огромные запасы воды под поверхностью, по всей планете — в виде льда.
Грунт Марса содержит огромное количество железа, которое и делает поверхность красной. На Марсе пока не известны никакие полезные ископаемые. Но есть предположения, что планета должна иметь много различных залежей полезных ископаемых, так как структура жизни и процветания планеты очень схожа с Землей. Марс может оказаться богатой планетой в плане полезных ископаемых, таких как: медь, железо, кобальт и даже золото.
За последние 20 лет к Марсу и его спутникам было совершено множество беспилотных полетов. Не все из них закончились удачно. Результатах исследования планеты нас поразили.
§ В 1976 г. было обнаружено «поле пирамид» (высота «пирамид» - от 250 м до полутора километров) и каменное образование, напоминающее человеческую голову. Это образование ученые назвали «Марсианским сфинксом»
В 2004 г. были обнаружены следы испарения соленой морской воды. Тогда же были сделаны снимки трех черепов. Один из них похож на череп ящера, жившего на Земле в древности. Другой – на череп современного гепарда. Третий напоминает череп гуманоида. Была сделана и потрясающая фотография – фигурка женщины. Марсоходы передали сведения о погоде на Марсе, исследовали грунт. Ученые сделали вывод о том, что грунт планеты похож по составу на земную почву.

§ Сейчас на планете находятся два марсохода и три орбитальных аппарата. Исследовав марсианские недра, аппараты выяснили, что в почве присутствуют химические вещества необходимые для возникновения жизни: кислород, водород, углерод, азот, фосфор, серу, хлор и метан.
Вывод: планета Марс давно изучается учеными, но все же остается загадочной. Может быть в будущем нам предстоит открыть еще несколько тайн Марса.
Практическая часть. Создаем модель марсохода.
Затем мы приступили к созданию модели нашего марсохода. Для сборки мы взяли конструкторы LEGO: LEGO WEDO (базовый и ресурсный) и LEGO (Простые механизмы: Технология и физика)


Исходя из выше изложенного, мы поняли, что наш аппарат должен быть устойчивым, надежным, способным выдержать суровый марсианский климат: ветры, перепады температур и др. Наша модель должна иметь датчики наблюдения, сбора информации, дроны для сбора образцов горных пород, почвы, пыли, воздуха, воды и т.д.
 |
Описание модели.
Наша модель марсохода состоит из исследовательской станции, в которой проводятся эксперименты и исследования и двух дронов. Она снабжена аккумуляторной батареей и моторчиком. При сборке мы использовали зубчатую и ременную передачи.

Дрон 1. Проводит исследования в воздухе: изучает поверхность почвы, рельеф местности, берет пробы воздуха, пыли. , пыл
Дрон 2. Проводит исследования на поверхности: способен брать пробы почвы, горных пород, льда. Приспособлен для работы в экстремальных условиях, т.к. может трансформироваться.
 |
Всю добытую информацию дроны доставляют на исследовательскую станцию. Там все образцы исследуются, дробятся, перерабатывается на наличие полезных ископаемых и результаты исследований передаются на планету Земля. Наш Марсоход оборудован антенами для передачи и приема сиглалов, имеет фонари, оборудован системой передачи телевизионных изображений местности, приспособление для изучения различных излучений, лазеры, которые помогают изучать процесс таяния и испарения воды.
Нам понадобится:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Драйвер двигателя L9110S
- 1 сервопривода SG-90
- Bluetooth модуль HC-05 или аналог
- USB-UART для прошивки arduino
- Мотор редуктор 6v 1:150 100 об/мин
- 2 светодиода
- 2 резистора 150 Ом
- Конденсатор 10v 1000uF
- 2 однорядных гребенки PLS-40
- Катушка индуктивности 68мкГн
- 2 аккумулятора Li-ion 18650
- Коннектор папа-мама двух контактный на провод
- Хомутик
- Провода разных цветов
- Припой
- Канифоль
- Паяльник
- Болтики 3х20, гайки и шайбы к ним
- Болтики 3х40
- Болтики 3х60
- Канцелярский или просто острый нож
Шаг 1 Подготовка механической части.
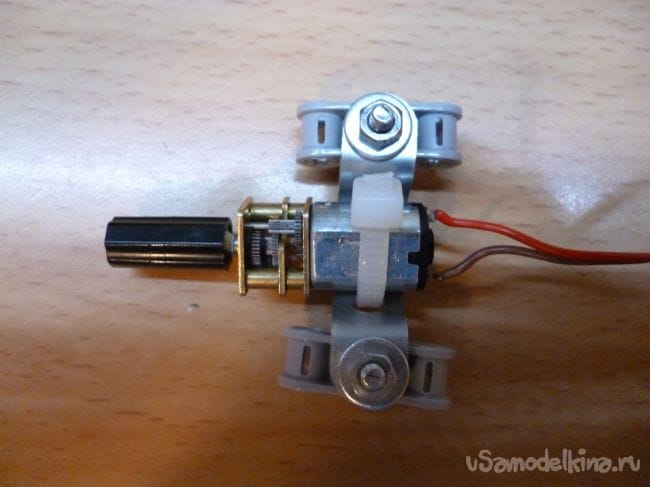
Мотор-редуктор 6v 1:150 100 об/мин необходим для нашей модели и приводит в движение заднюю ось. Вы можете поэкспериментировать и попробовать другое передаточное число. 100 об/мин на мой взгляд оптимальное. Мотор-редуктор не предусмотрен для соединения с деталями Lego. Поэтому его надо немного переделать. Острым или канцелярски ножом необходимо придать форму креста выходным валам редуктора. По размерам крест должен совпадать с обычной крестовой осью Lego.
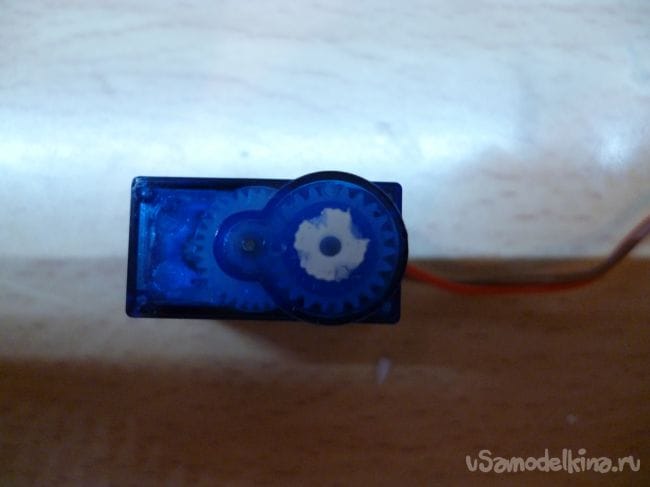
Для осуществления поворота колес будем использовать сервопривода SG-90. Он также не предусмотрен для соединения с Lego деталями. Чтобы закрепить его на нашей модели надо аккуратно просверлить, так чтобы не задеть внутренние части сервопривода, сквозное отверстие диаметром 3.2 мм или просто вырезать канцелярским ножом. В это отверстие мы будем вставлять болтик для соединения с Lego. А также отрезать выступающие части («крылья» для крепления):
На вал сервопривода надеваем рычаг с прикрученной деталью от lego:
Шаг 2 Сборка корпуса
Для сборки корпуса нам нужна инструкция Lego 42029. Ее легко можно скачать с официального сайта Lego .
Необходимо скачать и первую и вторую части.
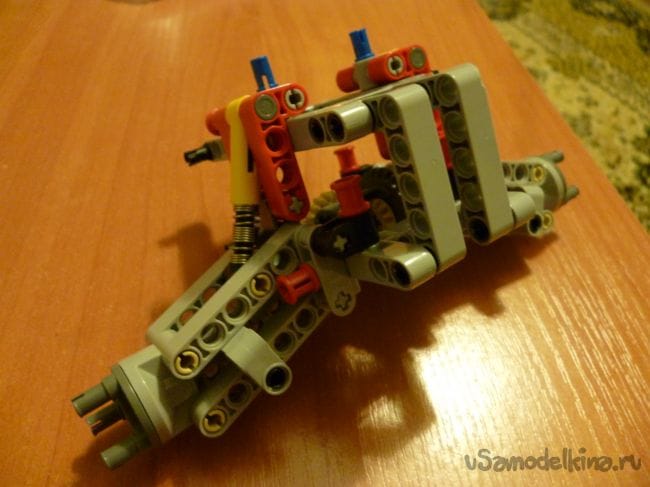
Основу заднего моста собираем по инструкции Lego 42029 часть 1, начиная с 3 страницы по 8 включительно. Немного добавляем для крепления пружин:
На подрезанную ось мотор-редуктора надеваем соединительную втулку Lego. Сам редуктор крепим болтом 3х60 мм как показано на фото:
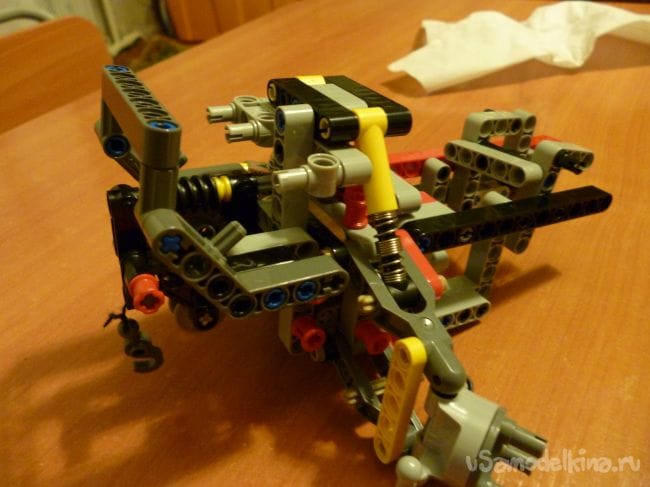
Переходим к передней части. Переднюю часть подвески собираем по инструкции Lego 42029 часть 1, с 21 страницы по 23. Трапецию берем из второй части Lego инструкции с 6 страницы по 11. Добавляем деталей спереди как показано на фото:
Сооружаем передний бампер как показано на фото:
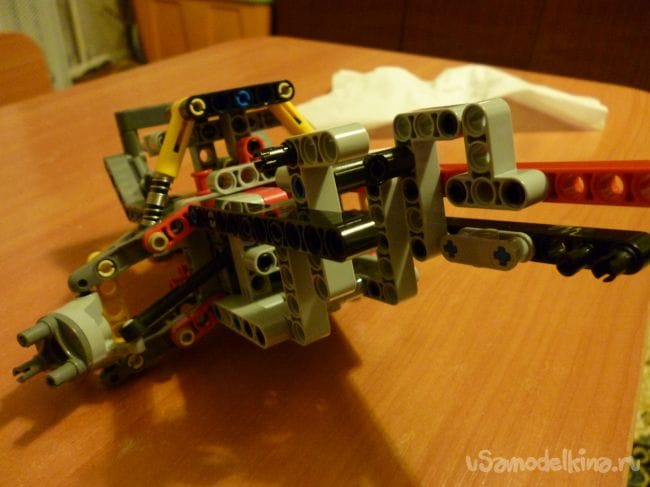
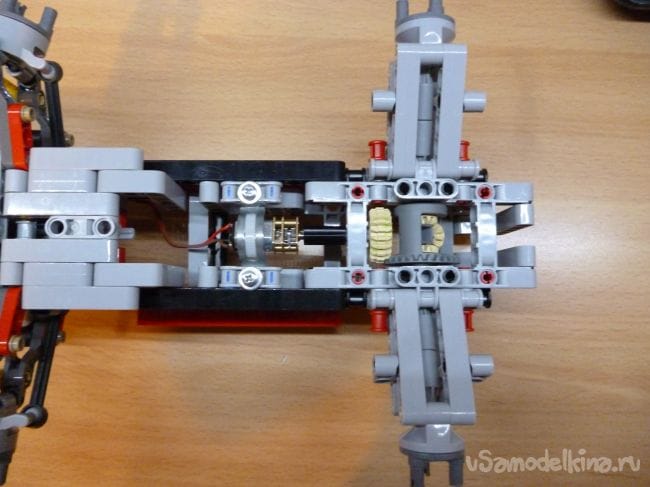
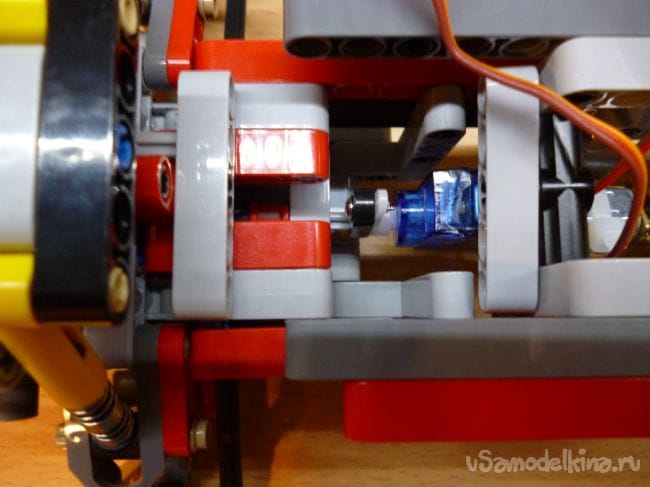
Сервопривод крепим примерно посередине машины, и соединяем валом с шестеренкой, осуществляющей поворот колес:
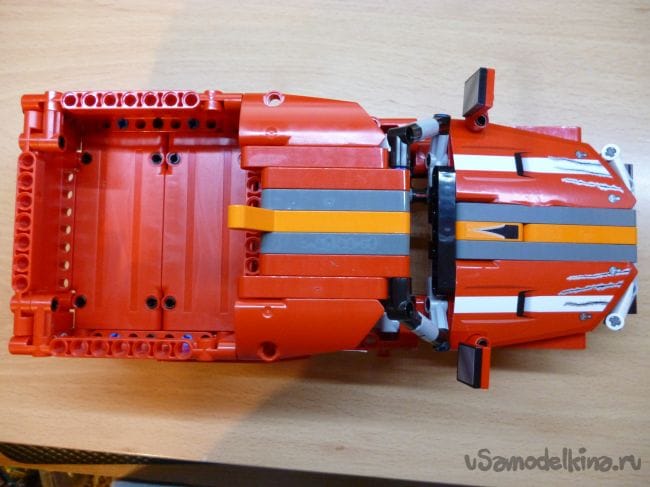
Соединяем обе части вместе. Снизу все должно выглядеть так:
Кабину необходимо собрать по фотографиям:
Добавим светодиодов как фары:
Ставим кабину сверху переднего моста. Сзади собираем бампер и крепим пластину:
Осталось собрать среднюю платформу, тоже по фото:
Ставим ее на место:
На этом сборка корпуса закончена.
Шаг 3 Электрика.
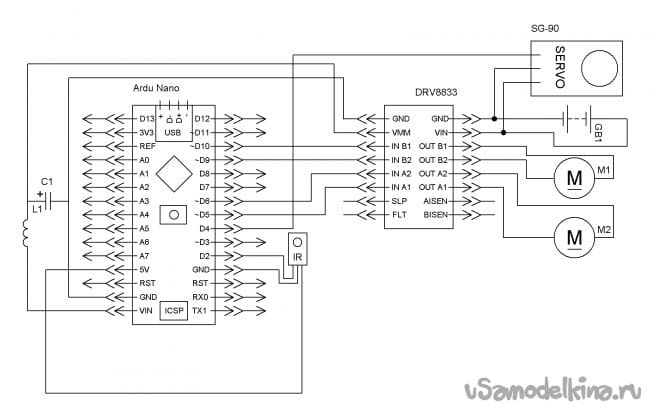
Для питания моторчиков и Bluetooth модуля будем использовать два аккумулятора Li-ion 18650 спаянных параллельно. Также для удобства подключения стоит припаять к ним соединительный коннектор:
Для питания Arduino проще всего использовать отдельное питание, например, 9 вольтовою крону. Если нет желания впихивать еще и батарейку туда, можно запитать Arduino от тех же аккумуляторов, но при этом необходимо в разрыв плюсового провода питания Arduino вставить катушка индуктивности 68мкГн, а также подключить конденсатор 10v 1000uF на туже линию питания. Управляющий провод сервопривода подключаем к pin 2, а драйвер двигателя к pin 5 и 6:
Также можно подключить фары. Для этого подключаем через резисторы аноды двух светодиодов к 4 pin Arduino, катоды к GND. Резисторы подбираются под используемые светодиоды.
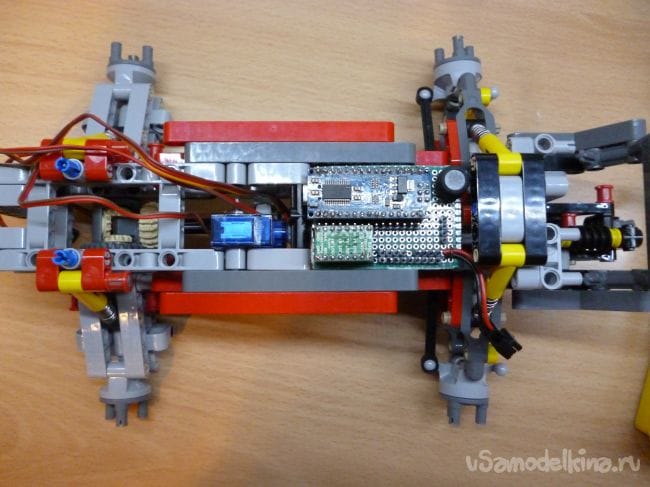
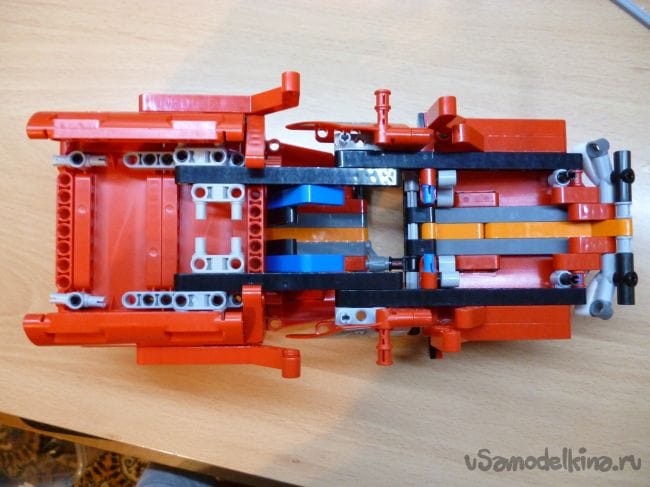
Вся собранная электрика занимает не очень много места:
Размещаем ее в задней части "марсохода", под большой пластиной:
Шаг 4 Подготовка среды программирования.
Для написания скетча будем использовать Arduino IDE. Версия должна быть не ниже чем 1.8. Скачиваем Arduino IDE с официального сайта.
Далее необходимо добавить в Arduino IDE библиотеки. В данном проекте используется две библиотеки Servo.h (для управления сервоприводом) и SoftwareSerial.h (для связи с Bluetooth модулем):
Вам необходимо их скачать и установить. Сделать это можно распаковав архивы и переместив все файлы в папку «libraries», находящуюся в папке с установленной Arduino IDE. Или можно воспользоваться другим способом - не распаковывая скачанные архивы, выбрать в среде Arduino IDE меню Скетч – Подключить библиотеку. В верху выпадающего списка выбрать пункт «Добавить .Zip библиотеку». И указать место нахождения скачанных архивов. После установки библиотек обязательно перезагрузить Arduino IDE.
Шаг 5 Настройка Bluetooth модуля.
Самыми распространёнными на сегодняшний день Bluetooth модулями являются HC-05 и HC-06. Они в изобилии присутствуют как в Китайских онлайн-магазинах, так и среди российских импортеров. HC-05 может работать как в режиме ведущего (master), так и в режиме ведомого (slave). HC-06 является только ведомым устройством. Иначе говоря, HC-06 не может сам обнаружить парное устройство и наладить с ним связь, он может быть только ведомым.
Как правило модули продаются в виде двух спаянных вместе плат. Меньшая из них — заводской модуль, широко используемый в разных электронных устройствах. Большая — специальная макетная платка для DIY проектов. Так выглядит меньшая плата с чипом BC417:
А так сами DIY модули HC-05 и HC-06:
Вы можно использовать любой понравившийся вам модуль. Модуль без макетной платы стоит дешевле, но тогда придется позаботиться о питании 3.3 V для модуля и помучится, припаивая к модулю провода. Я выбрал оптимальный, на мой взгляд, в соотношении цена\функционал HC-05. Каждый раз при прошивке отключать Bluetooth модуль от Arduino, на мой взгляд, неудобно, поэтому для связи мы будем использовать программный порт. Сделать это возможно благодаря библиотеке SoftwareSerial.
Соединяем следующим образом:
Arduino Pro Mini - Bluetooth
D7 – RX
D8 – TX
5V – VCC
GND –GND
Для правильной работы модуль надо настроить. Настройка производится путем ввода AT команд в окне терминала. Я буду настраивать модуль HC-05. Если у вас будет другой настройки могут отличатся. Для связи компьютера и Bluetooth модуля необходимо залить в Arduino следующий скетч. При этом Arduino будет выступать в роль связующего звена между Bluetooth модулем и компьютером:
После заливки скетча открываем окно терминала, ставим скорость 9600, и вводим следующие команды:
«AT» (без кавычек) должен прийти ответ «OK» (значит всю подключено верно и модуль работает)
«AT+BAUD96000» (без кавычек) должен прийти ответ «OK9600».
Если пришел нужный ответ, переходим к следующему шагу.
Шаг 5 Заливка скетча в Arduino.
Следующим шагом необходимо скачать и залит в Arduino следующий скетч:
Шаг 6 Настройка телефона.
Для Android телефона нам понадобится установить программу управления роботом через Bluetooth. Их много, различаются внешним видом и функционалом. Нужно ввести в Google play «Bluetooth Arduino» и выбрать ту, которая вам понравится. Я рекомендую BT Controller. Она бесплатная, а функционала достаточно чтобы управлять нашей машинкой. Скачиваем и устанавливаем на любое Android устройство. Далее, через настройки Android устройства, необходимо установить соединение с нашим модулем. Пароль для соединения «1234» или «0000». Затем провести настройку программы на соответствующие команды. Список приведен ниже.
Шаг 7 Настройка Windows (при необходимости)
Для любителей пользоваться настольным компьютером, ноутбуком или windows устройством есть программа, позволяющая отправлять команды по Bluetooth каналу. Для этого на этом устройстве должен быть Bluetooth. Устанавливаем связь с нашим модулем, через средства управления устройством. Пароль для подключения такой же «1234» или «0000». Можно пользоваться терминалом для отправки команд. Любым удобным для вас. Записав прошивку, управление производится следующими кнопками (командами):
W – вперед
S – назад
A – влево
D – вправо
F – стоп
G – руль прямо
K – включение фар
L – выключение фар
Пользоваться терминалом для управления не очень удобно. Поэтому я рекомендую Z-Controller. В программе нужно выбрать порт (com порт через который происходит соединение) и настроить клавиши на соответствующие команды. Настройка простоя и интуитивная. Я выкладываю саму программу и настройки для нашего «марсохода»:
Модель «Марсоход» очень интересная модель из набора WeDo 2.0. Передние колеса сделаны так, что легко преодолевают неровности на дороге и мелкие барьеры. Дети легко справятся со сборкой. Инструкция не требует особой внимательности. Все шаги в инструкции виду 2.0 просты и интуитивно понятно. Сложности детей ждут только в решении практических задач.
Сборку данной инструкции вы можете посмотреть на нашем Ютуб канале RobboBank .
Вот что должно получиться у детей:
 |  |
Для сборки марсохода по инструкции нам понадобится всего один набор LEGO Education WeDo 2.0. Также, после сборки моделей учеников ждут практические задания по программированию.
Задания виду 2.0:
1) Ученикам нужно будет модернизировать заднюю ось марсохода так, чтобы при движении назад он смог повернуть в сторону. Да, это непростое задание, но если немного приложить усилий, то все непременно получится. Замените заднюю сплошную ось на два гвоздика. На одном из гвоздиков разместите стопорящую деталь (любую). Когда марсоход будет отъезжать назад, одна ось будет застопорена. Тем самым, двигаться будет только одно колесо. Так марсоход совершит поворот. Такое задание нужно для того, чтобы при реагировании на препятствия датчиком движения, марсоход не натыкался на них снова и снова.
2) Детям нужно будет добавить в управляющую программу блок звуковых эффектов, запишите для марсохода звук для движения вперед и звук для движения назад. Поставьте программу в цикл. Наверняка вы сможете найти такие звуки в самом приложении виду 2.0.
Все детали входят в конструктор WeDo 2.0. Схема создана в программе Studio 2.0 , но представлена в презентации. Это сделано для большего удобства учителя. Презентацию можно показать в любом классе, в отличие от программы.
Совершенно готовая сборка для показа на уроке детям по дополнительному образованию.
Все материалы проверены. Ошибок и вирусов нет.
Напоминаем, что скачать готовую пошаговую инструкцию по сборке для набора LEGO® Education WeDo 2.0 «Марсоход» вы сможете после нажатия на кнопку скачать и просмотра рекламы. За счет рекламы живет наш сайт. Спасибо за понимание!
Шаг 1 собираем заднюю часть подвески.
Вначале надо собрать заднюю часть подвески по инструкции Lego 42029 часть 1, начиная с 3 страницы и по 8 включительно. Далее добавляем немного деталей для того чтобы можно было установить двигатель и редуктор.



Шаг 2 передняя часть подвески.
Переднюю часть подвески собираем по инструкции Lego 42029 часть 1, с 21 страницы по 23. Трапецию берем из второй части Lego инструкции с 6 страницы по 11. Собираем лебедку из второй части страницы 14 – 22. И бампер часть вторая 34 -36 страницы.



Шаг 3 собираем шасси.
Соединяем обе части как показано на фото:



Проблему соединения мотор-редуктора с деталями конструктора я решил следующим образом: надел на ось мотор-редуктора соединительную втулку и вставил обрезок спички для фиксации. Для крепления мотор-редуктора использовал металлическую пластику от железного конструктора и хомутик.
Получилось следующее:
Крепим на шасси:
Для осуществления поворота взял сервопривод SG-90. Надо аккуратно просверлить, чтобы не задеть внутренние части, сквозное отверстие диаметром 3.2 мм или просто вырезать канцелярским ножом. А также отрезать выступающие части («крылья» для крепления). Вставляем болтик в проделанное отверстие и фиксируем гайками. На вал сервопривода надеваем рычаг с прикрученной деталью от lego:

Устанавливаем:
Второй сервопривод будем использовать для лебедки. Делаем тоже самое что и с первым. А теперь, его надо модернизировать так чтобы он свободно вращался. Для этого разбираем сервопривод, вынимаем плату и припаиваем провода напрямую к моторчику. Вынимаем главную шестерню и срезаем у нее ограничители хода. И наконец, делаем канцелярским ножом прорези на главной шестерне как на фото:


Шаг 4 управляющий контролер
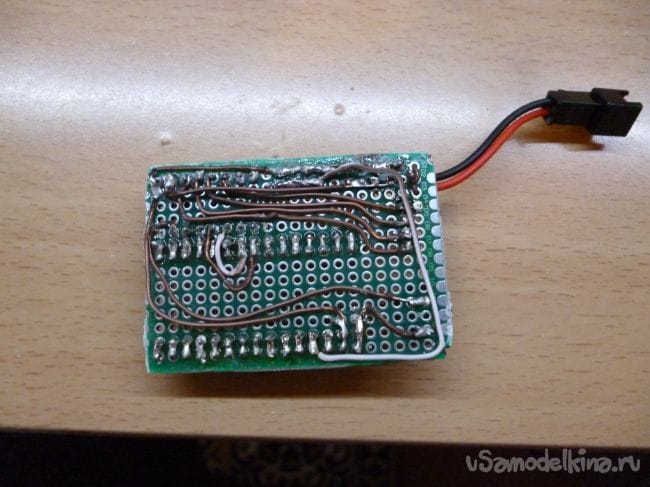
Для управления будем использовать Arduino и ИК приемник. Берем паяльник и собираем на монтажной плате следующее:
Поясняю: конденсатор любой маломощный, катушка индуктивности тоже какую найдете, нужно для стабилизации напряжения микроконтроллера. Резисторы подбираются под используемые светодиоды. IR приемник или TSOPможно взять от старой игрушки, или купить в радиомагазине. Если будут сильные помехи, надо добавить конденсатор в цепь питания IR приемника.
В итоге получаем:


Питания - 6 аккумулятора Ni-Mn 1.2v 1000mA. Надо спаять их последовательно и смотать изолентой. Приклеиваем на двусторонний скотч в задней части шасси.
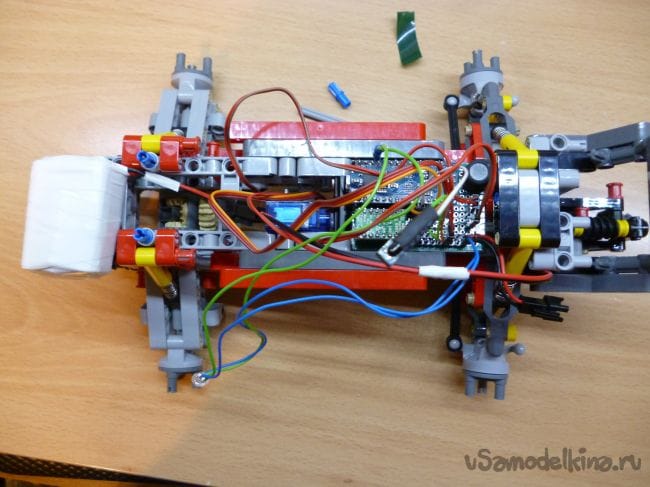
Соединяем всю нашу конструкцию:
Шаг 5 кабина
Кабина – это лично моя импровизация, готовых инструкция нет, так что надо собрать по фотографиям.


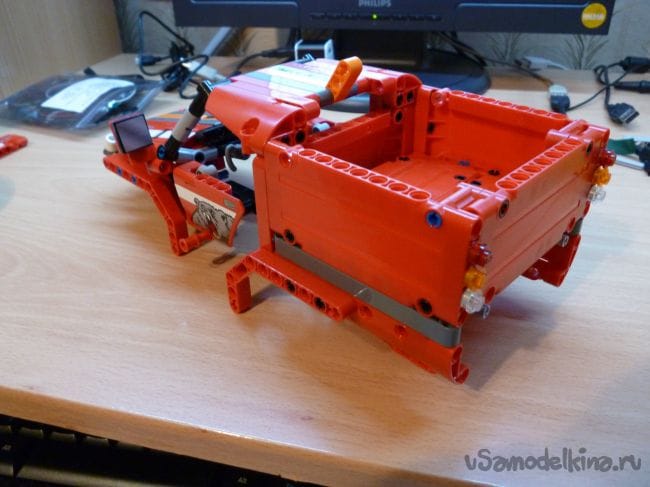

Вы можете собрать и свой вариант, просто надо будет подогнать под шасси. Здесь главное чтобы совпали крепления с шасси. Их четыре и они хорошо видны на фото снизу кабины.
Шаг 7 ставим на колеса.
Итак, нам осталось поставить кабину на шасси, надеть колеса и проверить наш внедорожник в действии.
Читайте также: