
Конструктор робот манипулятор механическая рука
Обновлено: 13.05.2024
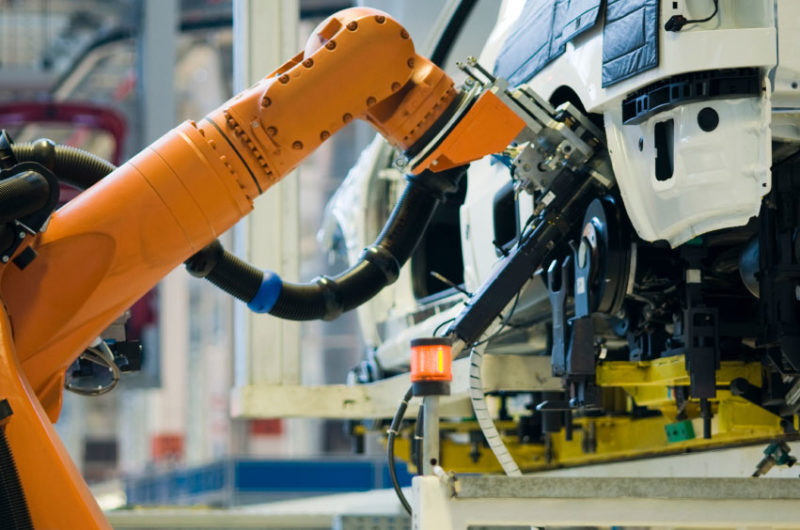
Роботы-манипуляторы – высокотехнологичные приборы, созданные, чтобы перемещать, вращать или иным образом воздействовать на объект путем выполнения тех или иных операций. Такие устройства были созданы, чтобы заменить монотонный, опасный или сложный технический человеческий труд.
Что такое роботы манипуляторы: назначение
Роботами-манипуляторами называют промышленные устройства, основной функционал которых имеет параметры с руками человека. Такие манипуляторы могут быть как автономными устройствами, так и входить в состав сложнейшего роботизированного комплекса. Фрагментарные части манипуляторов отличаются наличием узлов, которые делают возможными вращательные или поступательные движения.
Основной силой, которая приводит к развитию сферы робототехники, является потребность промышленности в сокращении затрат. Применение роботов-манипуляторов позволяет существенно снизить количество ошибок, допущенных в ходе производства, сократить количество произведенного брака, нецелесообразные потери сырья и числа травм среди персонала. Также применение робототехники позволяет сделать предприятие более гибким в вопросе применяемых технологий, улучшить условия труда работников и поднять безопасность в цехах на новый уровень.

Виды роботизированных манипуляторов
Единой классификации среди существующих роботов-манипуляторов на сегодняшний день нет. Устройства группируются по их технологическому назначению, конструктивным особенностям и другим параметрам.
По типу монтажа роботизированного оборудования
Мобильные
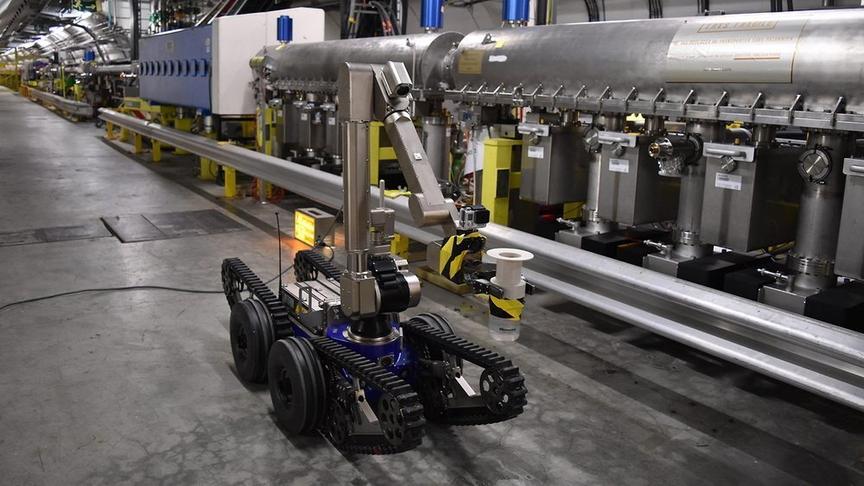
Приборы этого типа не имеют привязки к конкретному месту установки и предназначены для выполнения задач в любой точке производства или за его пределами. Они могут иметь разные источники питания – автономные или постоянные, разные условия, в которых допустимо их применение – для любой погоды, в воде, жестких или опасных условиях, например, разминирования и др. Мобильные устройства отличаются сравнительно небольшой массой и размерами, занимают мало места при транспортировке, а их возможности позволяют успешно преодолевать препятствия, возникающие на их пути. Нередко мобильные манипуляторы имеют блоки, отвечающие за наличие искусственного интеллекта. Недостатками являются высокая цена и небольшую полезную нагрузку (за редким исключением).
Стационарные
Самые распространенные роботы-манипуляторы. Могут отличаться в зависимости от выбранного типа крепления (напольный, потолочный, настенный). Основной характеристикой является повышенная грузоподъемность и широкий радиус действия.

Горизонтальные
Их длина может достигать нескольких десятков метров. Применяются в тех случаях, когда необходимо единовременное обслуживание нескольких участков.

Вертикальные - используются в условиях ограниченного пространства.
По типу применения
- Автономные роботы-манипуляторы (программируемые).
Такие манипуляторы могут быть расположены максимально близко от объектов, которые должны быть обработаны, и прочими роботизированными устройствами. Это позволяет планировать гибкие линии производства и максимально плотно использовать рабочую площадь помещений.
- Автономный робот-манипулятор с колесами всенаправленного движения.
Роботы, оснащенные колесами всенаправленного движения, могут перемещаться самостоятельно в любом выбранном направлении. Это позволяет применять устройства в условиях, куда невозможен доступ человека по тем или иным причинам.
Роботы-манипуляторы, которые управляются вручную, позволяют создать максимально точные детали.
Коллаборативные манипуляторы или коботы – роботизированная техника, которая предназначена для успешного взаимодействия с работниками в общем производственном пространстве. К таким приборам применимы максимально жесткие требования по безопасности конструкций и программному обеспечению, которые призваны исключить возможность нанесения травм сотрудникам.

По типу выполняемых функций
- Сборочные роботы-манипуляторы (сборка/разборка). Такая техника применяется во время промышленной сборки изделий любых размеров. Во время работы с деталями больших размеров вывод человеческого труда за рамки процесса позволяет ускорить производственный процесс и сократить область применения больших грузоподъемных устройств. В процессе производства мелких деталей увеличивается не только скорость, но и точность, а также качество работы.
- Пайка и сварка. Сварочные работы, которые выполняются с помощью роботов, позволяют обеспечивать высочайшее качество сварных швов и стабильность имеющихся дуг. Также отличительной чертой является высокие скорости сварных работ и применение крайне низкого тока, что невозможно при ручной аппаратной сварке. Роботы-манипуляторы, предназначенные для выполнения сварных работ, часто дополнительно оборудуются вращающимся столом, который позволяет выполнять действия в любом положении.
- Обработка материалов. Применение манипуляторов в этой сфере позволяет получить идеально гладкие поверхности, сопровождая процесс обработки укреплением стенок металла и повышения его твердости более чем на 30 % за счет холодной ковки. Автоматизированный процесс позволяет полностью исключить ручной труд по шлифовке и полировки деталей.
- Очистка, покраска, дозирование. Приборы используются для очистки поверхностей струями воды, подающимися под большим давлением, пескоструйной обработке или нанесения новых лакокрасочных слоев на готовые изделия. Один оператор при этом может успешно управлять сразу всем робототехническим комплексом.
- Резка и обработка. Процедура, сопровождающаяся травмами для живых работников, полностью безопасна для роботизированной техники. Помимо этого, манипуляторы могут производить операции по резке и обработке материала с максимально возможной точностью, снизив при этом до минимума потерю материала и сократив врем, затраченное на обработку.
- Строительные. Роботы-манипуляторы, применяемые в области строительства, способны возводить объекты с максимально возможной скоростью, предельно точно соблюдая заложенный программой план. Кроме того, машины могут работать и днем, и ночью, не завися от погодных условий и технологических особенностей производственного процесса.
- Прочие. Роботы-манипуляторы используются во всех сферах жизни человека, от военных операций по разминированию, до высокотехнологичных операций, связанных с медициной.

По типу привода
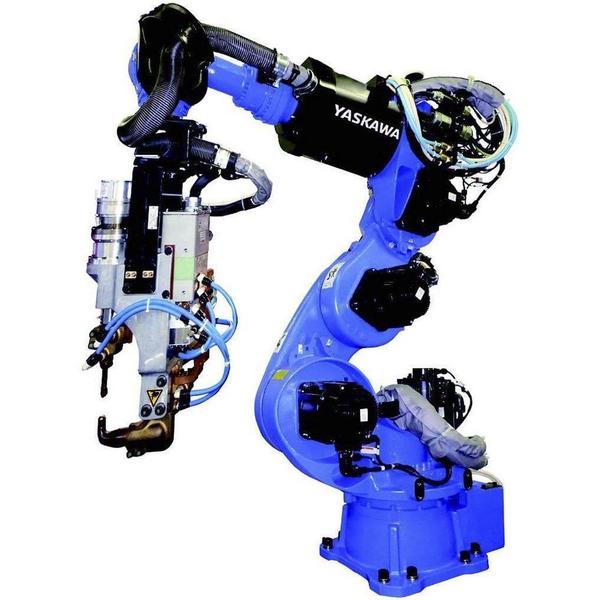
- Гидравлические роботы-манипуляторы. Используются в тех случаях, когда требуется работать с грузами, масса которых превышает 100 кг. Роботы этого типа оснащаются двигателями, в которых для приведения исполнительного органа в движение используется жидкость. Принцип работы заключается в наличии насоса, создающего давление рабочей жидкости в напорной магистрали, соединенной непосредственно с двигателем прибора. Он предназначен для преобразования давления жидкости в механическое. Такие манипуляторы чаще всего используются в тяжелой промышленности и автомобилестроении. Их преимуществами являются сравнительно небольшие размеры и вес установки, высокая производительность и возможность равномерного регулирования силы воздействия.
- Электрические. Могут быть разделены в зависимости от типа двигателя: синхронные и асинхронные; шаговые, а также серводвигатели. Манипуляторы приводятся в движение электрическим током и обладают большой производительностью и точностью операций.
- Пневматические. Рабочий инструмент приводится в движение через энергию, получаемую из сжатого воздуха. Основным компонентом системы является компрессор, который накачивает воздух в пневмолинии. Отсутствие вязкой среды позволяет применять приборы этого типа там, где требуется высокая скорость вращения пневмомотора. Обладают сравнительно более низкой производительностью, но гораздо менее чувствительны к воздействию внешних факторов.
По полезной нагрузке
- 0–20 кг. Роботы этого типа компактны, обладают высокой скоростью и точностью при небольшой грузоподъемности и маленькой рабочей зоне. Нередко используются в «чистых помещениях».
- 20–80 кг. Отличаются высокой производительностью и универсальностью в вопросах области применения. Такие манипуляторы оптимизированы для исполнения многократно повторяющихся быстрых операций. Роботы этого типа могут создавать компактные производственные цеха с повышенными показателями плотности в вопросе монтажа устройств при высоком качестве исполнения операций.
- 80–300 кг. Используются в сложных условиях производства. Отличаются высокой износостойкостью, высокой надежностью, а также простотой в вопросах настройки и управления.
- 300–1000 кг. Предназначены для использования в тяжелых условиях. Часто используются в автомобилестроении для поворачивания автомобильных кузовов, операций в кузнечных или литейных цехах.
- 1000–3000 кг. Могут легко манипулировать грузами с самой большой массой. Применяются на погрузо-разгрузочных работах благодаря своим возможностям с высокой точностью перемещать самые тяжелые грузы.

Области применения роботов-манипуляторов
Развитие современных технологий достигло небывалых высот, а роботы повсеместно заменяют человека. Они способны выполнять управляющие и двигательные функции на самых сложных участках производственного процесса. Каждый робот-манипулятор способен успешно заменить собой несколько десятков специалистов.
На сегодняшний день манипуляторы успешно применяются в следующих сферах:
- Строительная отрасль.
- Расфасовка и упаковка готовой продукции.
- Производства пищевых продуктов.
- Строительство автомобилей.
- Обработка деталей.
- Литейное производство.
- Транспортировка готовой продукции.
- Химическая промышленность.
- Производство крупногабаритной мебели.
- Обработка материалов и др.
Перспектива применения и преимущества
Робототехника из года в год становится все более доступной, в том числе и за счет стремительной автоматизации работы предприятий. Себестоимость устройств снижается (за последнее десятилетие их цена в среднем уменьшилась на 30 %), а эксперты в области промышленного производства делают прогнозы, что в ближайшее время их стоимость упадет еще не менее чем на 20 %. Также стоит отметить, что применение роботов-манипуляторов все чаще отмечается не только в крупных производственных концернах, но и в мелкой промышленности.
Применение современной робототехники в промышленности позволяет увеличить производственные мощности предприятий и их рентабельность, при этом существенно сократив затраты на возможный брак, обслуживание другой техники и повысив безопасность производства. Роботы-манипуляторы успешно применяются в самых разных отраслях экономики, позволяя снизить себестоимость продукции без снижения ее качества.
Сразу оговоримся, что совсем дешево делать не будем, т.к. не хочется убивать нервные клетки, делая доморощенные энкодеры для моторчиков + хочется упростить создание 3D модели, которая нужна для управления через ROS (ссылка на готовую модель – ниже в статье).
На момент написания статьи ориентировочная конечная стоимость изделия составляет ~70 000 руб. Если у вас есть 3D принтер, то можно смело вычесть из нее 20 000 руб. Если принтера нет, то его появление станет приятным бонусом. Все расходы я буду описывать исходя из того, что у нас нет ничего, кроме денег.
Как выглядит результат:

Также нужно отметить, что для программирования руки нам понадобится компьютер с установленными ОС Linux (я использую Ubuntu 18.04) и фреймворком ROS (я использую Melodic).
Может возникнуть вопрос «почему 70К рублей – это дешево?»
Отвечаю. Изначально я не хотел заморачиваться с созданием роборуки и думал просто купить что-нибудь простенькое, но достаточно функциональное в сборе.
Что являлось для меня критериями функциональности и минимальной допустимой простотой (т.е. почему НЕ подойдут манипуляторы с алиэкспресса) – можно обсудить в комментариях, чтобы не грузить тех, кому это очевидно и/или не интересно.
Конкурентные решения на рынке
Опишу, однако, кратко примеры того, что я рассматривал на рынке:
Забегая немного вперед скажу, что делать мы будем копию робо-руки PhantomX Pincher Robot Arm Kit Mark II, которая производится именно компанией TossenRobotics.
Итого, видим, что 70 000 руб – это совсем не так дорого.
Что же нам нужно купить?
Все цены привожу на момент написания статьи (июль 2020 года):
1) 6 моторчиков DYNAMIXEL AX-12A

Я покупал по цене 7200 руб за 1 штуку, но, кажется, можно найти и за 6000 при большом желании. Будем считать, что вам не повезет и вы тоже купите за 7200.
Суммарная стоимость: 43 200 руб
Подойдет любой простенький, можно уложиться в 20 000 руб.
3) Arduino Uno + Power Shield


Стоимость: ~4 000 руб
4) Опционально (но я очень рекомендую): Лабораторный источник питания

Стоимость: ~3 500 руб
Сборка
Отлично! Мы закупили все, что нам нужно (вероятно, дольше всего ждали доставки моторчиков, мне их везли больше месяца).
1) Напечатаем детали для манипулятора на 3D принтере.
Качаем STL файлы отсюда
2) Собираем воедино с моторчиками. Проблем со сборкой быть не должно, но если они вдруг появятся, можно воспользоваться вот этой инструкцией
Делаем 3D модель
Класс! Рука у нас есть, но ведь ей же нужно как-то управлять. Хочется максимально использовать достижения человечества, поэтому установим себе ROS.
Для того, чтобы полноценно работать с манипулятором в ROS – нужно сделать его URDF модель. Она будет нам необходима для того, чтобы управлять робо-рукой с помощью пакета MoveIT!
На момент написания статьи последняя стабильная сборка доступна для Melodic/Ubuntu 18.04, чем и объясняется мой выбор версии системы и фреймворка в начале статьи.
Построение URDF модели – довольно трудоемкая (и, на мой взгляд, самая скучная) часть данного проекта. Нужно немного допилить напильником stl модели компонентов и соединить их воедино в XML-образном файле, вручную подбирая правильные коэффициенты смещения деталей друг относительно друга.
Кто хочет – может проделать работу самостоятельно, всем остальным поберегу нервы и просто дам ссылку на свой готовый файл:
В данной модели пока нет захватывающего устройства, однако, до того момента, чтобы захватывать предметы в реальном мире нам еще далеко. Для остальных задач этой модели более чем достаточно.
Выглядит модель вот так:
Из полученного URDF файла мы сделаем конфиг MoveIT!, который позволит нам моделировать движения манипулятора и отправлять управляющие команды на реальную робо-руку.
Для создания конфига есть отличный туториал (ссылка)
Тут я могу опять сэкономить время и предоставить свой конфиг. Лежит он вот тут:
Можно скачать конфиг с гитхаба и запустить следующей командой:
Примерно так можно будет управлять нашей реальной робо-рукой через rviz, когда мы подключим ее к ROS:
А что с реальной рукой?
Переместимся из мира 3D моделей в суровую реальность. У нас есть собранный ранее манипулятор. Хотелось бы его как-то подвигать. Сделаем это с помощью Arduino UNO и Power Shield.
Подключим первый моторчик манипулятора (который снизу) к Power Shield'у и блоку питания следующим образом:

Да, data pin моторчика мы соединим сразу с 3 и 4 выводом Arduino. Пытливый читатель мануала Dynamixel (вот он) сразу заметит, что связь с внешним миром у моторчика организована по Half Duplex Asynchronous Serial Communication, а это означает, что data pin используется сразу и для получения команд и для ответа.
По умолчанию, на аппаратном уровне Arduino умеет работать только с Full Duplex UART. Эту проблему можно обойти, используя Soft Serial библиотеку, что мы и сделаем. Именно использование Half Duplex режима объясняет подключение data pin мотора к 3 и 4 выводам шилда одновременно.
Помимо полудуплексного обмена работа с Dynamixel через Arduino имеет еще пару занимательных моментов, которые могут быть не совсем очевидны с самого начала. Сведем их все воедино.
Как подвигать наш манипулятор?
1) Сначала скачаем нужную библиотеку. Она называется ardyno и ее можно получить через Arduino Library Manager, либо тут (ссылка)
2) По умолчанию Dynamixel AX-12A хотят работать с baud rate = 1000000. Однако Software Serial Interface не потянет такую скорость, поэтому baud rate стоит снизить до 57600. Таким образом, начало файла с вашей программой будет выглядеть примерно вот так:
3) Все наши моторчики соединены друг с другом последовательно. Значит, чтобы обращаться к каждому из них — нужно знать его ID? Это действительно так, объект DynamixelMotor при инициализации получает два параметра: interface (одинаков для всех, его мы задали в предыдущем пункте) и id (должен быть у всех разный, иначе поведение будет у манипулятора весьма странное)
Id каждому моторчику придется задать вручную. Кажется, что будучи соединенными последовательно, они могли бы и сами рассчитаться по номерам от 1 до 6, но этого не предусмотрено. Поэтому нужно каждый моторчик отдельно подключить к Arduino (отключив от остальных) и выполнить следующую программу:
Изначально все моторчики имеют именно поэтому мы и указываем вверху
NEW_ID для каждого моторчика нужно заменить на число от 1 до 6 (да, ок, первый моторчик можно не трогать). Нумеруем их в порядке от нижнего к верхнему.
Ура! у нас есть полноценный манипулятор, который мы можем двигать, а также имеется 3D модель к нему. Можно брать ROS и программировать любые крутые штуки. Но это уже рассказ для отдельной статьи (и не одной). Данное же повествование подошло к концу, спасибо за внимание!
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Ссылки
Файлы для резки оргстекла, 3D-модели, список для покупки, чертежи платы и софт можно скачать в конце моей основной статьи.
Подробная инструкция по сборке в фотографиях (осторожно, траффик).
Здравствуйте! Рассказываем о линейке коллаборативных роботов-манипуляторов Universal Robots.
Компания Юниверсал-роботс родом из Дании, занимается выпуском коллаборативных роботов-манипуляторов для автоматизации циклических производственных процессов. В этой статье приведем их основные технические характеристики и рассмотрим области применения.

Что это?
Продукция компании представлена линейкой из трех облегченных промышленных манипуляционных устройств с разомкнутой кинематической цепью: UR3, UR5, UR10.
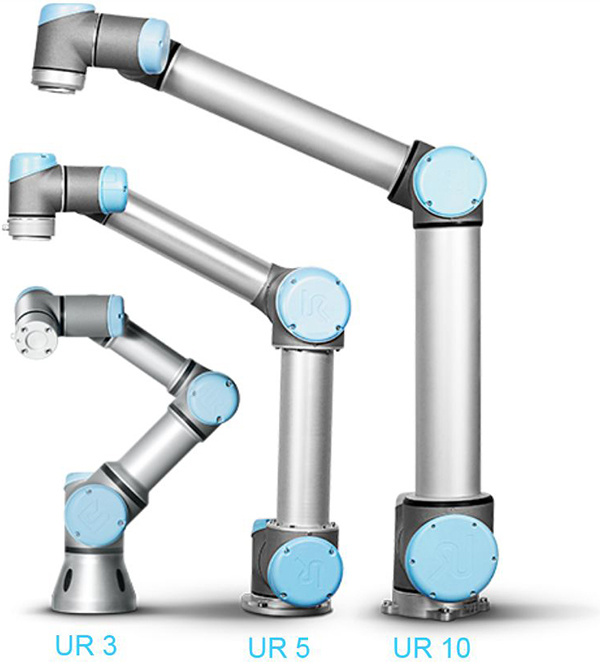
Все модели имеют 6 степеней подвижности: 3 переносные и 3 ориентирующие. Устройства от Юниверсал-роботс производят только угловые перемещения.

Роботы-манипуляторы разделены на классы, в зависимости от предельно допустимой полезной нагрузки. Другими отличиями являются — радиус рабочей зоны, вес и диаметр основания.

Все манипуляторы UR оснащены датчиками абсолютного положения высокой точности, которые упрощают интеграцию с внешними устройствами и оборудованием. Благодаря компактному исполнению, манипуляторы UR не занимают много места и могут устанавливаться в рабочих секциях или на производственных линиях, где не помещаются обычные роботы.


Характеристики:

Чем интересны
Простота программирования
Специально разработанная и запатентованная технология программирования позволяет операторам, не владеющим специальными навыками, быстро выполнить настройку роботов-манипуляторов UR и управлять ими с помощью интуитивной технологии 3D-визуализации. Программирование происходит путем серии простых передвижений рабочего органа манипулятора в необходимые положения, либо нажатием стрелок в специальной программе на планшете.
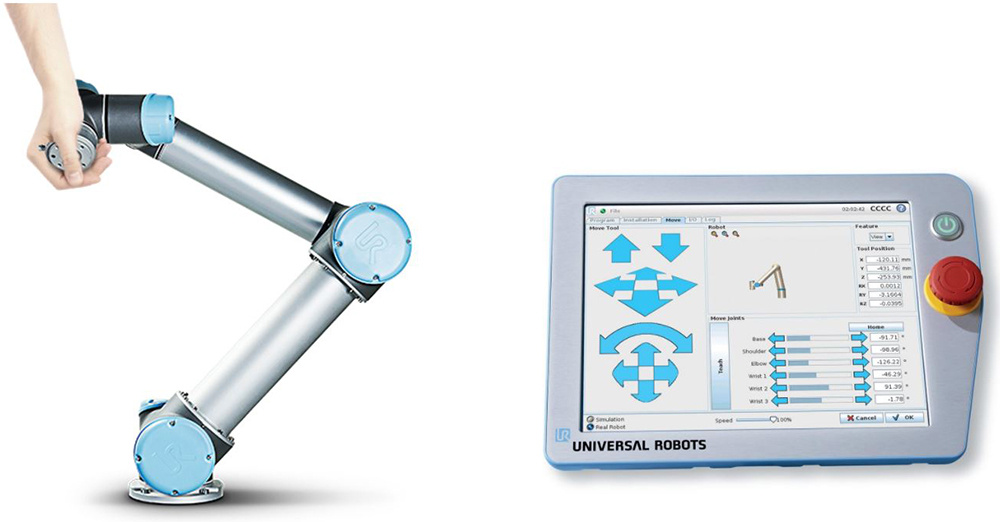
Быстрая настройка
Оператору, выполняющему первичный запуск оборудования, потребуется менее часа для распаковки, монтажа и программирования первой простой операции.

Коллаборативность и безопасность
Манипуляторы UR способны заменить операторов, выполняющих рутинные задачи в опасных и загрязненных условиях. В системе управления ведется учет внешних возмущающих воздействий, оказываемых на робот-манипулятор в процессе работы. Благодаря этому, манипуляционные системы UR можно эксплуатировать без защитных ограждений, рядом с рабочими местами персонала. Системы безопасности роботов одобрены и сертифицированы TÜV – Союзом работников технического надзора Германии.

Многообразие рабочих органов
На конце промышленных манипуляторов UR предусмотрено стандартизированное крепление для установки специальных рабочих органов. Между рабочим органом и конечным звеном манипулятора можно установить дополнительные модули силомоментных сенсоров или камер.

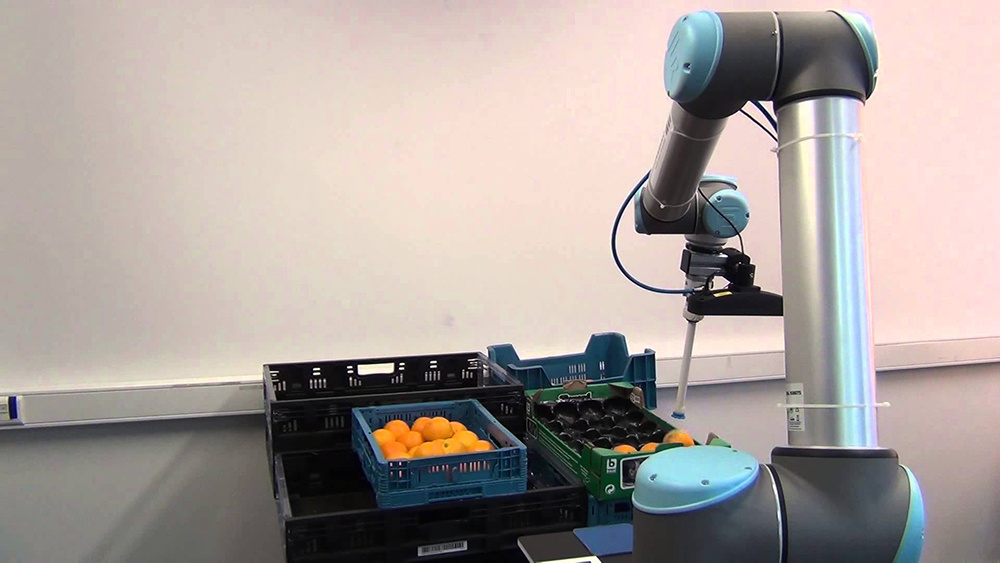
Возможности применения
С промышленными роботами-манипуляторами UR открываются возможности автоматизации практически всех циклических рутинных процессов. Устройства компании Юниверсал-роботс отлично зарекомендовали себя в различных областях применения.
Перекладка
Установка манипуляторов UR на участках перекладки и упаковки позволяет увеличить точность и уменьшить усадку. Большинство операций по перекладке может осуществляться без надзора.
Полировка, буферовка, шлифовка
Встроенная система датчиков позволяет контролировать точность и равномерность прикладываемого усилия на криволинейных и неровных поверхностях.

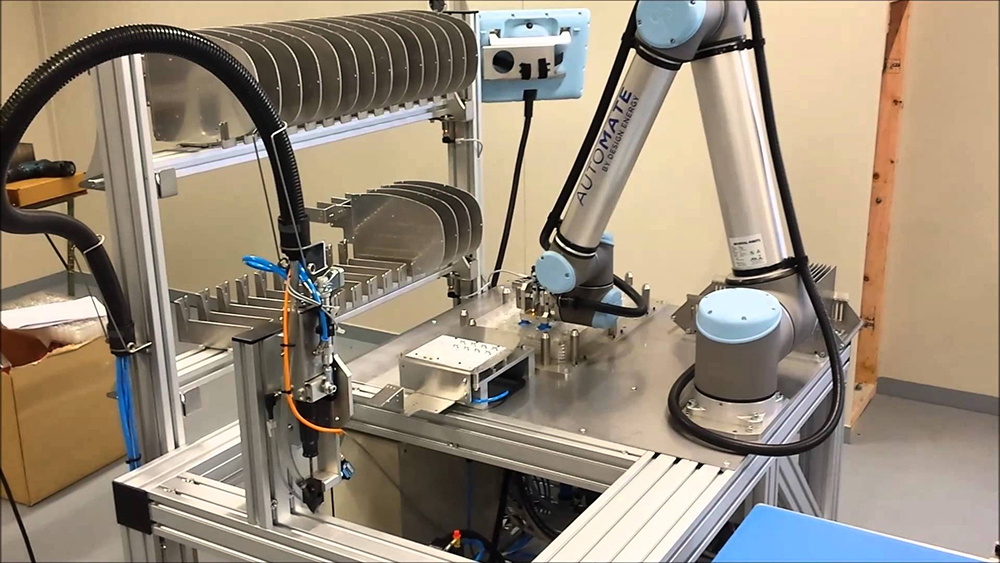
Литье под давлением
Высокая точность повторяющихся движений позволяет применять роботы UR для задач переработки полимеров и инжекционного литья.

Обслуживание станков с ЧПУ
Класс защиты оболочки обеспечивает возможность установки манипуляционных систем для совместной работы со станками ЧПУ.


Упаковка и штабелирование
Традиционные технологии автоматизации отличаются громоздкостью и дороговизной. Легко настраиваемые роботы UR способны работать без защитных экранов рядом с сотрудниками или без них 24 часа в сутки, обеспечиваю высокую точность и производительность.

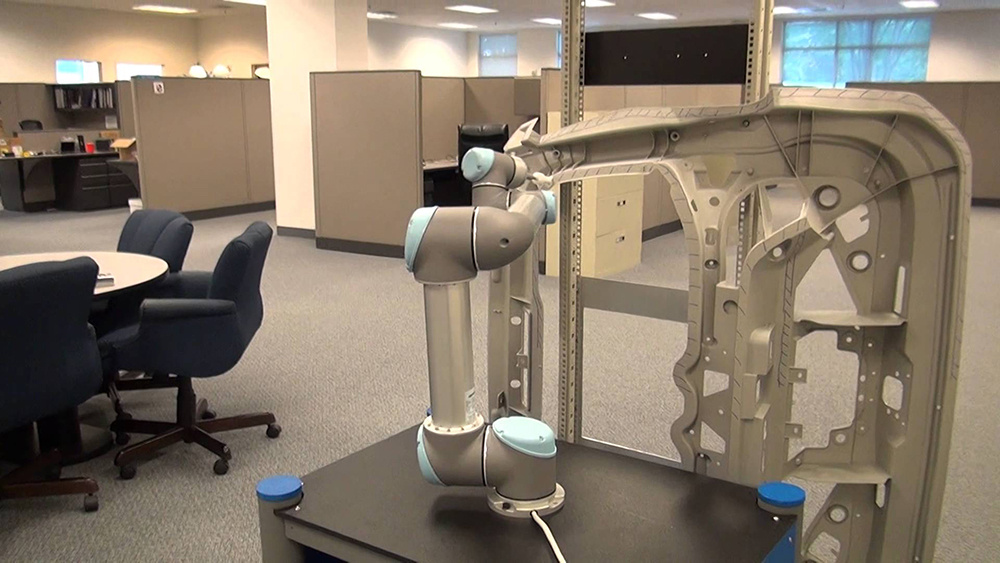
Контроль качества
Роботизированный манипулятор с видеокамерами пригоден для проведения трехмерных измерений, что является дополнительной гарантией качества выпускаемой продукции.

Сборка
Простое устройство крепления рабочего органа позволяет оснащать роботы UR подходящими вспомогательными механизмами, необходимыми для сборки деталей из дерева, пластика, металла и других материалов.
Свинчивание
Система управления позволяет контролировать развиваемый момент во избегании избыточной затяжки и обеспечения требуемого натяжения.

Склеивание и ">сварка
Высокая точность позиционирования рабочего органа позволяет сократить количество отходов при выполнении операций склейки или нанесения веществ.
Промышленные роботы-манипуляторы UR могут выполнять различные типы сварки: дуговую, точечную, ультразвуковую и плазменную.

Итого:
Промышленные манипуляторы от Юниверсал-роботс компактны, легки, просты в освоении и обращении. Роботы UR – гибкое решение для широкого круга задач. Манипуляторы можно запрограммировать на любые действия присущие движениям человеческой руки, а вращательные движения им удаются намного лучше. Манипуляторам не свойственны усталость и боязнь получить травму, не нужны перерывы и выходные.
Решения от Юниверсал-роботс позволяют автоматизировать любой рутинный процесс, что увеличивает скорость и качество производства.
Обсудите задачи автоматизации производственных процессов с помощью манипуляторов от Юниверсал-роботс с официальным дилером — в Top 3D Shop.
Робот в переводе с чешского означает «работать», а робот манипулятор – устройство, которое принудительно можно вращать в разные стороны, заставляя выполнять те или иные операции. Разработаны они, чтобы выполнять повторяющиеся действия вместо человека сложные, а порой опасные операции. В управлении роботы манипуляторы простые.
Конструкция
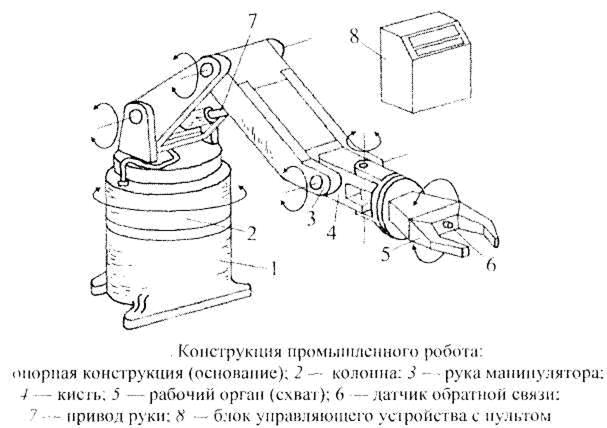
По конструкции манипулятор рука напоминает человеческую руку.
Она имеет:
- плечо, представляющее неподвижную основу, к которой крепятся остальные части:
- запястье;
- локоть;
- кисть.
Промышленный робот манипулятор оснащается одной и более рук и пультом управления. В радиусе их действия он может перемещать тяжелые детали со скоростью до 1000 раз в минуту. Понятно, что человека они превосходят как в скорости, так и в точности выполнения однообразной работы.
Управляющий роботом манипулятором оператор отслеживает его действия на экране либо наблюдает непосредственно. Возможно удаленное наблюдение благодаря камере, которой оснащают робот манипулятор. Нередко роботы способны обучаться, поскольку снабжен специальной программой. Единожды «проведя» его по технологическому процессу, последовательность операций запоминается устройством, а затем точно воспроизводится.
Используют манипуляторы роботы в условиях опасности или труднодоступности, в частности для оснащения глубоководных конструкций, применяемых для выполнения работ на значительных глубинах, в космонавтике и пр.
С конца шестидесятых стали появляться роботы нового поколения — интеллектуальные, снабженные сенсорами очувствления, которые собирают информацию о свойствах окружающих предметов и их взаимодействии, обрабатывают ее и предпринимают нужные действия.
ТОП-6: DIY робот

Обзор
7 DOF робот-манипулятор из Китая передвигается благодаря шасси, управляется дистанционно. Вес его небольшой, а грузоподъемность «приличная». Благодаря семи степеням свободы, применяться робот манипулятор может для выполнения работ в любом направлении.
Характеристики
- Размер – 290х290х100 мм;
- Пол – унисекс;
- Масштаб – 1/144;
- Ток срабатывания и нагрузки – 4500 мА и 200 мА;
- Степеней свободы – 7;
- Материал – сплав алюминия;
- Трек – пластиковый;
- Колеса – металлические;
- Момент крутящий — 9.5kgNaN;
- Шумность – 56 дБ;
- Напряжение – 9В;
- Масса – 1,5 кг;
- Грузоподъемность – 7 кг;
- Вес, длина и ширина когтя — 40 грамм, 83 и 54 мм.
Без переплаты робот манипулятор купить можно в онлайн магазинах:
| Предложения | Рубли |
| https://ru.aliexpress.com/item/7-DOF-robot-arm-Tank-car-aluminum-chassis-ABB-industrial-robot-model-electronic-competition/32702405795.html?ws_ab_test=searchweb0_0,searchweb201602_2_10320_10152_10321_10151_10065_10344_10068_10342_10547_10343_10340_10341_10194_10084_10083_10618_10304_10307_10301_5711212_5722316_10180_10313_10059_10184_10534_100031_10103_10624_10623_10622_10186_10621_10620_10142_10125,searchweb201603_36,ppcSwitch_5&algo_expid=94908646-19bf-4d6e-a526-017d63d83c0d-17&algo_pvid=94908646-19bf-4d6e-a526-017d63d83c0d&transAbTest=ae803_5&priceBeautifyAB=0 | 18018 |
| https://ru.aliexpress.com/item/7-DOF-robot-arm-Tank-car-aluminum-chassis-ABB-industrial-robot-model-electronic-competition/32702405795.html | 17511 |
| https://www.banggood.com/ru/DoArm-S7-7-DOF-Robot-Tank-Car-Chassis-With-Metal-Robotic-Manipulator-Arm-Claw-For-Arduino-p-1260800.html?cur_warehouse=CN | 12946 |
| http://tarzan-movie.ru/abb-industrial-robot-model-7-dof-robot-arm-frame-all-aluminum-robotic-arm-rack-7-servos-rotating-base/ | 8274 |
| https://translate.googleusercontent.com/translate_c?depth=1&hl=ru&prev=search&rurl=translate.google.nl&sl=en&sp=nmt4&u=https://www.ebay.com/itm/DoArm-S7-7-DOF-Robot-Tank-Car-Chassis-With-Metal-Robotic-Manipulator-Arm-Claw-/122967824705&xid=17259,15700021,15700105,15700124,15700149,15700168,15700173,15700201&usg=ALkJrhhPfcYdUe755YxiwWpsyQVzw3FZVw | звонить |
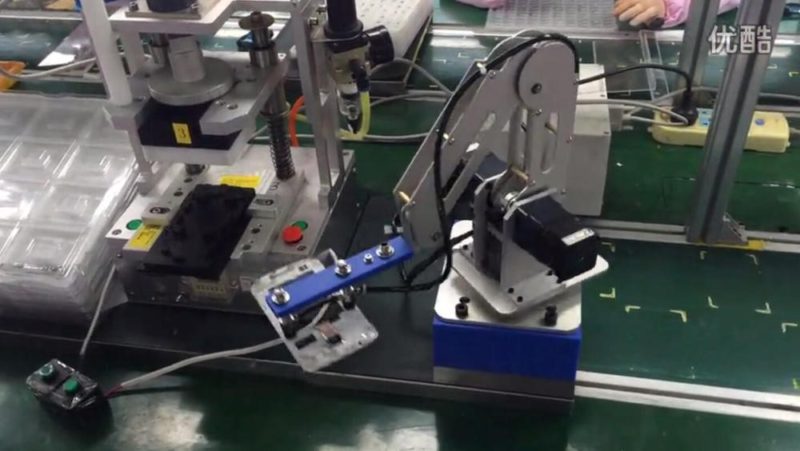
ТОП-5: ABB промышленный робот 798 механическая рука
Особенности
У данной модели робота-манипулятора 6 степеней свободы:
- маленькая и большая руки;
- талия;
- запястье.
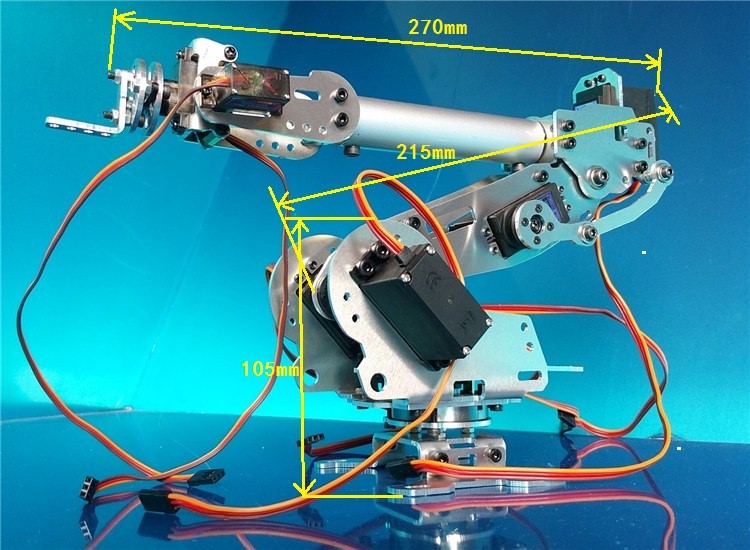
Для вращения суставов робота-манипулятора применяются высококачественные подшипники. Привлекательная внешне полностью металлическая рука имеет размеры, указанные ниже на фото.
Благодаря дистанционному управлению, работать с китайским роботом-манипулятором удобно и легко.
Разрабатывалась конструкция для обучения и проведения экспериментов. Во время работы всякие вибрации отсутствуют благодаря креплению основания к поверхности надежными стандартными зажимами. Рука робота-манипулятора по желанию оснащается присосками, захватом, вилкой или электромагнитом.
Характеристики
- Вес с упаковкой — 2 кг;
- Размер упаковки – 350х250х100 мм.
- Возрастная категория – с 14 лет.
Комплект поставки
- Рука механическая – 1 шт;
- Сервоприводы — 5 х mg966r и 2 х MG90S.
Поставляется робот в разобранном виде, поэтому, после распаковки потребуется сборка. На робот манипулятор цена в среднем составляет 12 тысяч рублей.
Купить
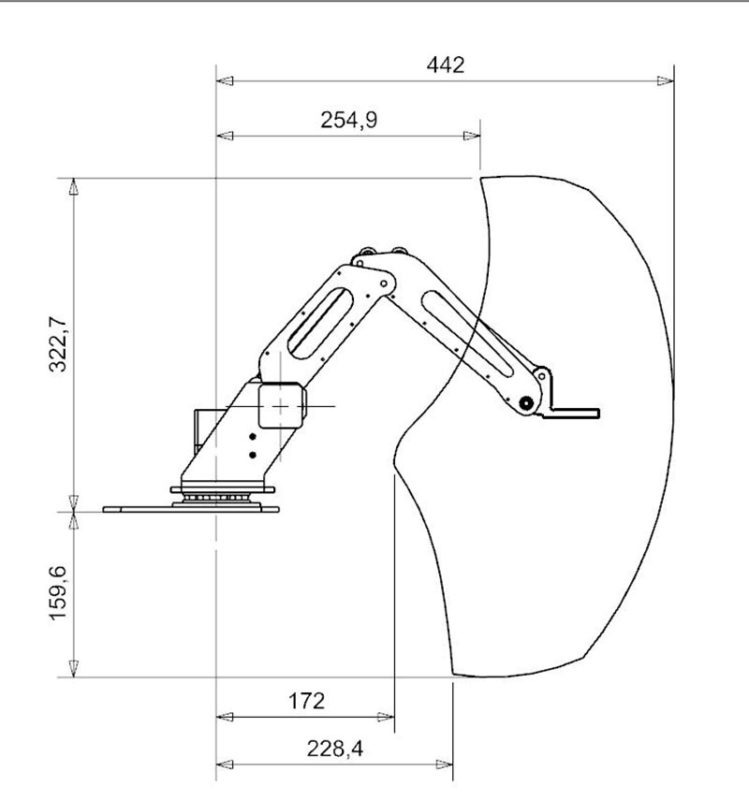
ТОП-4: Diot 3dof Industrial Robotic arm Manipulator Robot Arm 3 Axis with Full Metal

Характеристики
- Производит – SZDoit;
- Возраст — с 8 лет;
- Радиус действия рычага – 400 мм (максимальный).
Конструкция
Для повышения общей прочности производитель использовал утолщения в наиболее уязвимых местах. Вращающаяся установка робота-манипулятора позволяет в этой модели использовать моторы различных размеров.
Рекомендуем:
- Рейтинг лучших роботов пылесосов, отзывы, особенности, цена: ТОП 5 : что собой представляет, возможности, характеристики, цена ТОП 10: их параметры, цены и где купить:
Все действия робота — манипулятора отличаются высокой точностью благодаря оснащению датчиками, контролирующими угол наклона, импульсными переключателями индуктивными и поддержкой 3D головки печатающей.
Конструкция робота — манипулятора отличается удобством, чему способствуют присоски, которыми оборудована рука, а также ручка-держатель и сервопривод. ПО, которым манипулятор оснащен, делает удобным процесс контроля.
Купить
| Предложение | Рубли |
| https://ru.aliexpress.com/item/Doit-3DOF/32849018684.html?ws_ab_test=searchweb0_0%2Csearchweb201602_2_10320_10152_10321_10151_10065_10344_10068_10342_10547_10343_10340_10341_10194_10084_10083_10618_10304_10307_10301_5711212_5722316_10180_10313_10059_10184_10534_100031_10103_10624_10623_10622_10186_10621_10620_10142_10125%2Csearchweb201603_36%2CppcSwitch_5&algo_expid=94908646-19bf-4d6e-a526-017d63d83c0d-14&algo_pvid=94908646-19bf-4d6e-a526-017d63d83c0d&transAbTest=ae803_5&priceBeautifyAB=0 | 50270 |
| https://ru.aliexpress.com/item/Doit-3DOF/32849018684.html | 49198 |
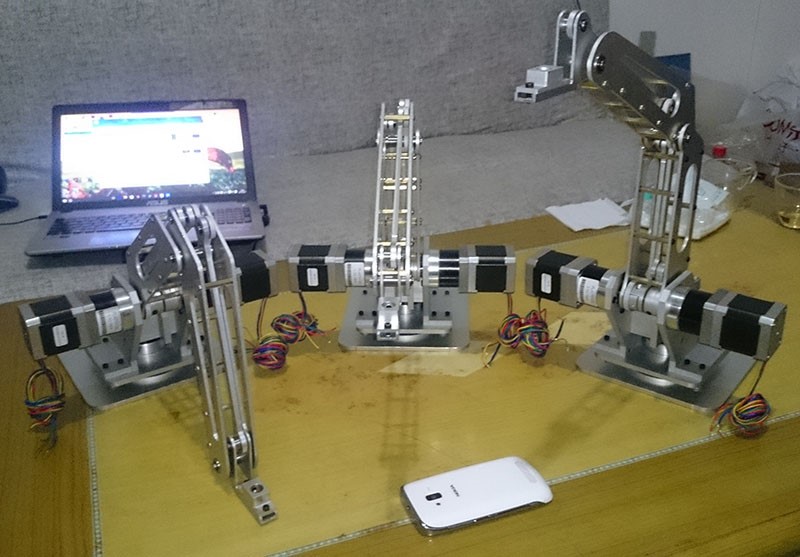
ТОП-3: робот A400

Характеристики технические
- Масса с упаковкой – 8 кг;
- Размер — 5000х400х300 (с упаковкой);
- Бренд – smaring.
Робот-манипулятор, ставший весьма популярным в мире, отличается высокой точностью выполнения работ, производительностью, скоростью и надежностью, поэтому производитель на него предоставляет гарантию.
Робот-манипулятор не дрожит при работе, выполняет движения плавно благодарястеппер мотору с планетарным приводом.
Все вращающиеся детали у него сделаны из подшипникового провода. Размеры робот — манипулятора представлены на картинке.
Купить
| Купить | Цена в рублях |
| https://ru.aliexpress.com/item/Robot-Arm-A400-Mechanical-high-precision-stepping-Motor-robot-arm-industrial-robot-arm-for-industrial-robot/32813561759.html?ws_ab_test=searchweb0_0,searchweb201602_2_10320_10152_10321_10151_10065_10344_10068_10342_10547_10343_10340_10341_10194_10084_10083_10618_10304_10307_10301_5711212_5722316_10180_10313_10059_10184_10534_100031_10103_10624_10623_10622_10186_10621_10620_10142_10125,searchweb201603_36,ppcSwitch_5&algo_expid=94908646-19bf-4d6e-a526-017d63d83c0d-13&algo_pvid=94908646-19bf-4d6e-a526-017d63d83c0d&transAbTest=ae803_5&priceBeautifyAB=0 | 53352 |
| http://162.250.123.140:30054/item/Robot-Arm-A400-Mechanical-high-precision-stepping-Motor-robot-arm-industrial-robot-arm-for-industrial-robot/32683401186.html?ws_ab_test=searchweb0_0,searchweb201602_0_10130_10152_10151_10618_10059_10534_10313_10084_100031_10083_10547_10624_10623_10307_10626_10627_10341_10065_10340_10068_10343_10342_10125_10301_10103_10620_10344_10545_10622_10324_10621,searchweb201603_0,ppcSwitch_0&algo_pvid=92f68b6d-510a-445e-86fd-f774421cda7f&algo_expid=92f68b6d-510a-445e-86fd-f774421cda7f-0 | 51658 |
| https://ru.aliexpress.com/item/Robot-Arm-A400-Mechanical-high-precision-stepping-Motor-robot-arm-industrial-robot-arm-for-industrial-robot/32813561759.html | 52213 |
| https://ru.aliexpress.com/item/Robot-Arm-A400-high-precision-stepping-Motor-robot-arm-industrial-robot-arm-for-industrial-robot-arm/32814006780.html | 55546 |
| https://m.ru.aliexpress.com/item/32814006780.html | 55547 |
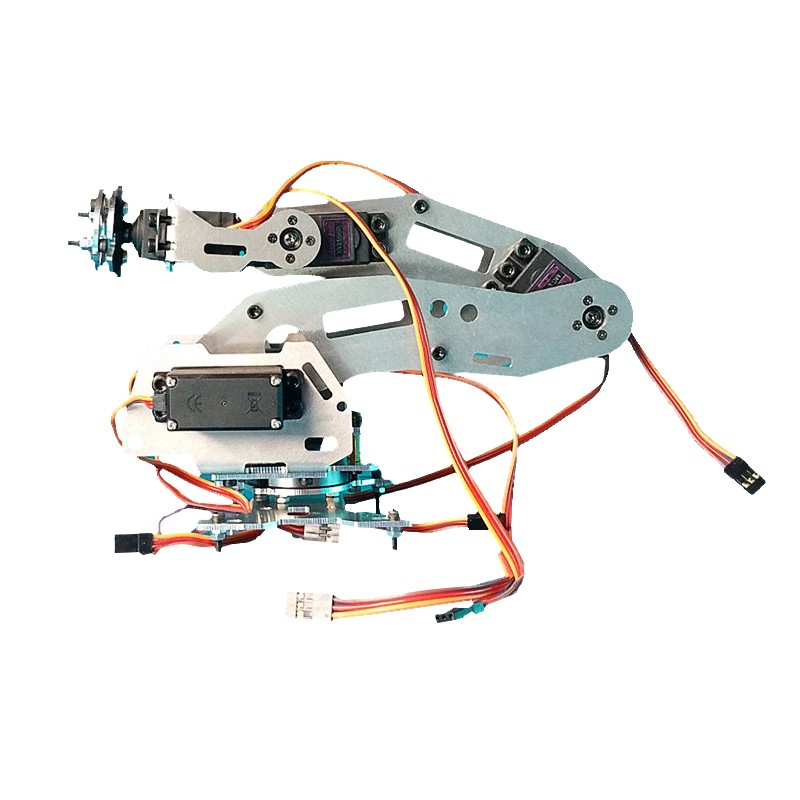
ТОП-2: 4 Фо рука робота 3D вращающийся машина DIY автомобиль рука P0090 Servo комплект DIY робот умный робот для RC модель
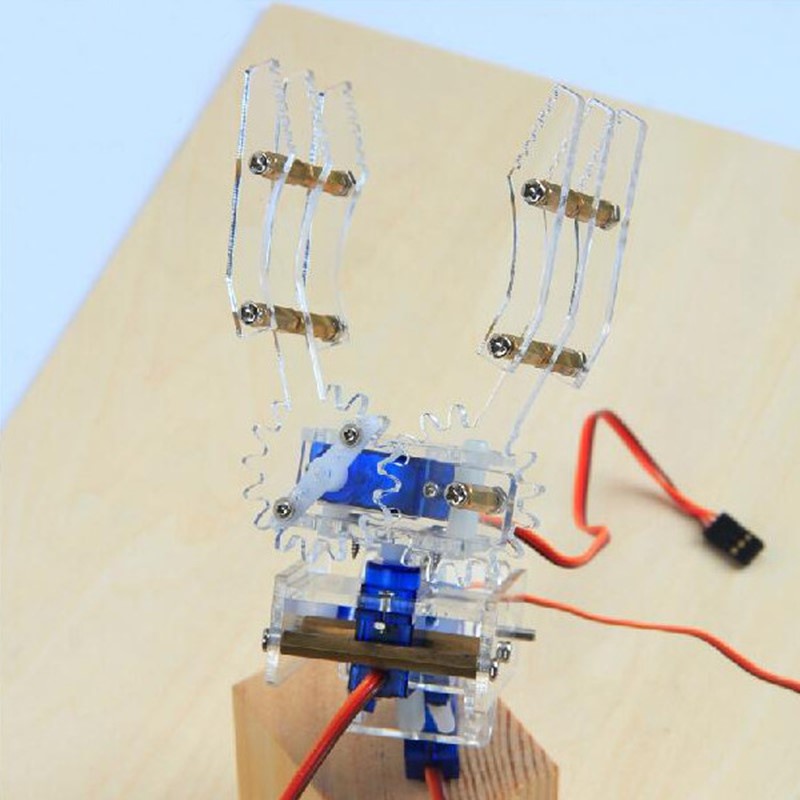
Эти модели умных роботов-манипуляторов бренда Feetech предназначен для детей, достигших трехлетнего возраста.
Параметры
Детей роботизированная рука привлекает необычным внешним видом. Отличается конструкция сильным захватом, быстрым откликом, простым исполнением. Для робот-манипулятора характерна высокая точность.
Применение
Устройство с шестью степенями свободы предназначено для обучения детей, позволяет установить дистанционный пульт, который в комплекте не поставляется. Благодаря высоконадежным подшипникам рычаг двигается, не испытывая большого трения.
Его донные соединения сделаны из металлического servos редуктора.
Дизайн
Дизайн робот-манипулятора красивый, стильный и практичный. Устройство просто устанавливается, отличается длительным сроком службы, идеально подходит для самолетов, вертолетов, лодок, автомобилей.
Величина размаха руки соответствует приведенной на картинке, совместимо со стандартными приемниками:
| Магазины | Стоимость в рублях |
| https://ru.aliexpress.com/item/High-Quality-4-DOF-Robot-Arm-3D-Rotating-Machine-DIY-Car-Arm-P0090-Servo-Kit-DiY/32795743129.html?ws_ab_test=searchweb0_0,searchweb201602_2_10320_10152_10321_10151_10065_10344_10068_10342_10547_10343_10340_10341_10194_10084_10083_10618_10304_10307_10301_5711212_5722316_10180_10313_10059_10184_10534_100031_10103_10624_10623_10622_10186_10621_10620_10142_10125,searchweb201603_36,ppcSwitch_5&algo_expid=94908646-19bf-4d6e-a526-017d63d83c0d-12&algo_pvid=94908646-19bf-4d6e-a526-017d63d83c0d&transAbTest=ae803_5&priceBeautifyAB=0 | 1140 |
| https://ru.aliexpress.com/item/1set-Acrylic-4-DOF-Robot-Arm-3D-Rotating-Machine-DIY-Car-Arm-P0090-Servo-Kit-DIY/32821018867.htm | 1351 |
| https://ru.aliexpress.com/item/High-Quality-4-DOF-Robot-Arm-3D-Rotating-Machine-DIY-Car-Arm-P0090-Servo-Kit-DiY/32813563731.html?dp=7fca03820c7f2fbbbdaefa5730ff320c&af=616826&cv=47843&afref=http%253A%252F%252Fru.exposale.shop%252Fitem%252Fhigh-quality-4-dof-robot-arm-3d-rotating-machine-diy-car-arm-p0090-servo-kit-diy-32813563731.aspx&mall_affr=pr3&aff_platform=aaf&cpt=1520603947642&sk=VnYZvQVf&aff_trace_key=37f3b520cd6e4f638ea9d9a09cd51e42-1520603947642-00597-VnYZvQVf&terminal_id=8f9788227e5b4bc699e27385f3f0fa38 | 1716 |
| https://likemall.ru/hotaliexpress/i32795743129x0/ | 1078 |
ТОП-1: S6 6DOF 6 оси робота ABB модели манипулятор с 4 шт. MG996R и 2 шт. MG90S

Описание
Робот – манипулятор с отличными соединениями на высококачественных подшипниках, благодаря которым двигаются они с наименьшим трением. Для обучающего процесса это большой плюс.
Параметры
- Выпускает китайский бренд Robo-Soul;
- Возрастная категория – от 8 лет и старше;
- Степень готовности – не требуется сборка;
- Управление – дистанционное;
- Размер – 25 сантиметров;
- Число осей — 6;
- Материал – нержавеющая сталь.
Купить
| Купить | Стоимость в рублях |
| https://ru.aliexpress.com/item/RoboSoul-Stainless-Steel-S6-6DOF-6-Axis-Robot-Arm-ABB-Model-Manipulator-with-4PCS-MG996R-and/32816817003.html?ws_ab_test=searchweb0_0,searchweb201602_2_10320_10152_10321_10151_10065_10344_10068_10342_10547_10343_10340_10341_10194_10084_10083_10618_10304_10307_10301_5711212_5722316_10180_10313_10059_10184_10534_100031_10103_10624_10623_10622_10186_10621_10620_10142_10125,searchweb201603_36,ppcSwitch_5&algo_expid=94908646-19bf-4d6e-a526-017d63d83c0d-11&algo_pvid=94908646-19bf-4d6e-a526-017d63d83c0d&transAbTest=ae803_5&priceBeautifyAB=0/ | 6490 |
| https://ru.aliexpress.com/item/RoboSoul-Stainless-Steel-S6-6DOF-6-Axis-Robot-Arm-ABB-Model-Manipulator-with-4PCS-MG996R-and/32816817003.html/ | от 6505 |
| https://www.ebay.com/itm/6DOF-Robot-Arm-Stainless-Steel-ABB-Model-Manipulator-with-4PCS-MG996R-2PCS-MG90S-/282617984002?_ul | по запросу |
| https://moskva.tiu.ru/p325567336-doarm-dof-robot;wholesale.html | 5755 |
| http://active.mbk-ek.ru/131299977/official+doit+doarm+s6+6dof+robot+arm+abb+model+mechanical+manipulator+with+mg996r%2B+mg90s%2Bespdui.html | 8763 |
Читайте также: