
Lego mindstorms ev3 лабиринт программа
Обновлено: 29.04.2024
На данном уроке мы рассмотрим, как пользоваться собственными блоками Ev3 при программировании Ev3.
Напишем программу для Ev3 для прохождения лабиринта. Когда в программе много раз повторяется одна и также последовательность команд, то удобно использовать собственные блоки. Это делает программу очень наглядной и удобной для изменения. Каждый блок отвечает за свой смысловой набор действий,, который можно обособить и выделить.
А далее из этих собственных блоков конструируется программа, согласно логике задания. Рассмотрим, как написать программу для Ev3 для прохождения лабиринта с помощью собственных блоков. Напишем блокидвижение вперед до стены.

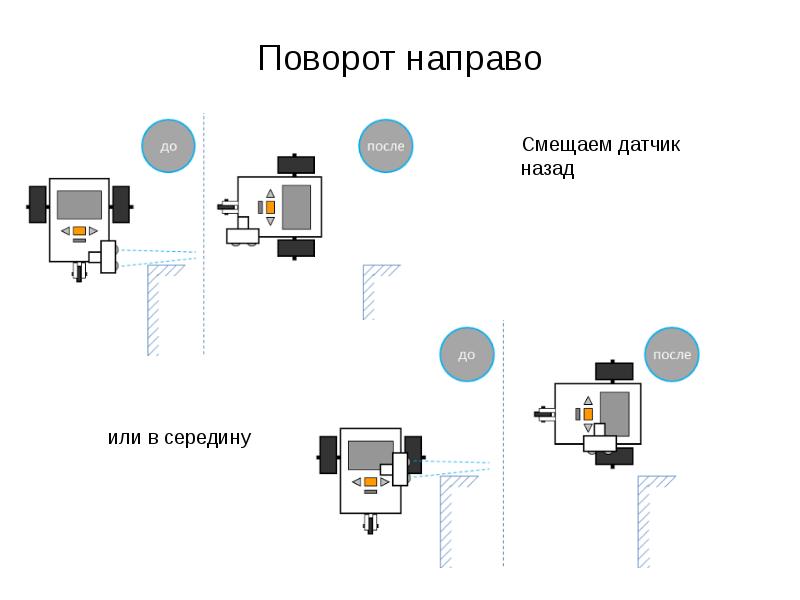
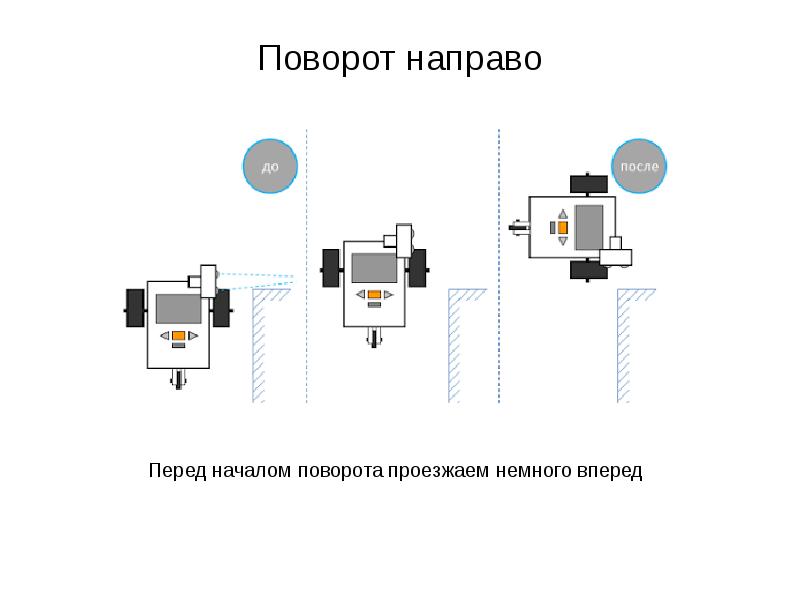
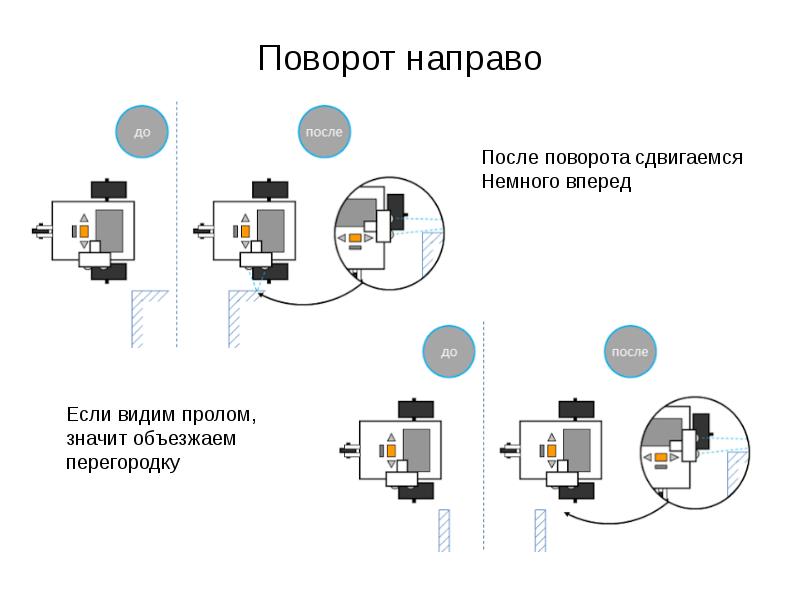
Поворот направо на Ev3

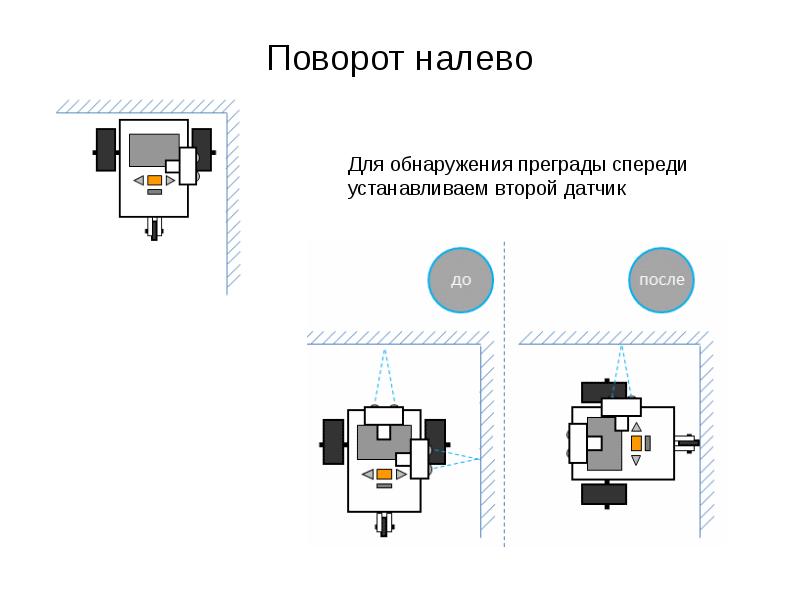
Поворот налево на Ev3

Выделяя эти части программы и выбирая в меню Инструменты раздел Конструктор моего блока, создадим три блока: vpered, parvo, levo. Подробно как создавать свои блоки в Ev3.Составим программу из собственных блоков Ev3 для прохождения такого лабиринта.Робот должен двигаться со старта вперед до левой стенки, потом повернуться направо и двигаться до стенки, потом повернуться направо и двигаться до стенки, налево и до стенки, и налево и до стенки до финиша.

Реализуем этот лагоритм с помощью собственных блоков Ev3 , которые мы создали.

Как видим программа достаточно лаконичная. Представьте, какая была бы большая программа без использования собственных блоков.Аналогично мы можем составить программу для прохождения лабиринта любой сложности.
Новый набор Мастер-Кит » Роботы подобные животным
На данном уроке мы рассмотрим, как пользоваться собственными блоками Ev3 при программировании Ev3.
Напишем программу для Ev3 для прохождения лабиринта. Когда в программе много раз повторяется одна и также последовательность команд, то удобно использовать собственные блоки. Это делает программу очень наглядной и удобной для изменения. Каждый блок отвечает за свой смысловой набор действий,, который можно обособить и выделить. А далее из этих собственных блоков конструируется программа, согласно логике задания. Рассмотрим, как написать программу для Ev3 для прохождения лабиринта с помощью собственных блоков.Напишем блокидвижение вперед до стены.

Поворот направо на Ev3

Поворот налево на Ev3

Выделяя эти части программы и выбирая в меню Инструменты раздел Конструктор моего блока, создадим три блока: vpered, parvo, levo. Подробно как создавать свои блоки в Ev3.Составим программу из собственных блоков Ev3 для прохождения такого лабиринта.Робот должен двигаться со старта вперед до левой стенки, потом повернуться направо и двигаться до стенки, потом повернуться направо и двигаться до стенки, налево и до стенки, и налево и до стенки до финиша.

Реализуем этот лагоритм с помощью собственных блоков Ev3 , которые мы создали.

Как видим программа достаточно лаконичная. Представьте, какая была бы большая программа без использования собственных блоков.Аналогично мы можем составить программу для прохождения лабиринта любой сложности.
Вернуться к содержанию Перейти к следующей теме Математика в ev3
Полезно почитать по теме прохождение лабиринта ev3
Собственные блоки ev3
Циклические алгоритмы ev3
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!
Плавающие роботы изучат крупнейший сатурнианский спутник
В то время как марсианские пустынные ландшафты бороздят колесные исследовательские приборы, исследователи рассматривают варианты изучения небесных тел, на поверхности кот.
![]()
Нападающий коготь
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 - инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора - образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании "Компас". Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования "Шорт трек" категории "Hello, robot!". Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

Вы можете изучить и скачать доклад-презентацию на тему Движение в лабиринте. Программа EV3. Презентация на заданную тему содержит 9 слайдов. Для просмотра воспользуйтесь проигрывателем, если материал оказался полезным для Вас - поделитесь им с друзьями с помощью социальных кнопок и добавьте наш сайт презентаций в закладки!
201291 201172 201168 201282 201176 201293 201284 201175 201177 201163 201171 201174 201166 201290 201283 201170 201165 201289 201285 201288 201164 201286 201294 201281 201178 201287 201167 201173 201292 201169
Обратная связь
Если не удалось найти и скачать доклад-презентацию, Вы можете заказать её на нашем сайте. Мы постараемся найти нужный Вам материал и отправим по электронной почте. Не стесняйтесь обращаться к нам, если у вас возникли вопросы или пожелания:
Не стесняйтесь обращаться к нам, если у вас возникли вопросы или пожелания:
Мы в социальных сетях

Одним из видов соревнований по робототехнике является прохождение роботом лабиринта. Сегодня мы представляем простую модель, собранную на базе домашней версии EV3. Эту модель и программу вы можете использовать как пример для собственной модели робота. Это даст вам возможность принять участие в соревнованиях, которые проходят во многих крупных городах Украины.
Итак, начнем.
1) Скачайте архив с инструкцией по сборке
2) Распакуйте его в любую папку.
3) Запустите файл «Building Instructions [MazeSolver].html»
4) В бровзере откроется инструкция для сборки конструкции.
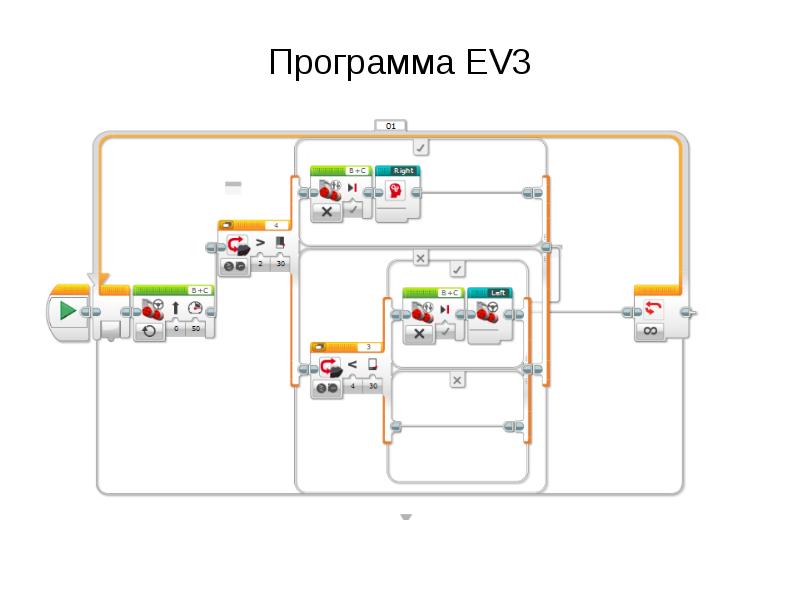
5) Скачайте программу для робота
6) Запустите среду программирования Lego Ev3 и загрузите файл «MazeSolver.ev3″
7) Подключите робота к ПК и загрузите программу в робота.
8) Робот готов. Поставьте его рядом со стеной (датчик расстояния должен смотреть в стену).
9) Выберите на блоке управления загруженную программу с названием «index» и запустите ее.
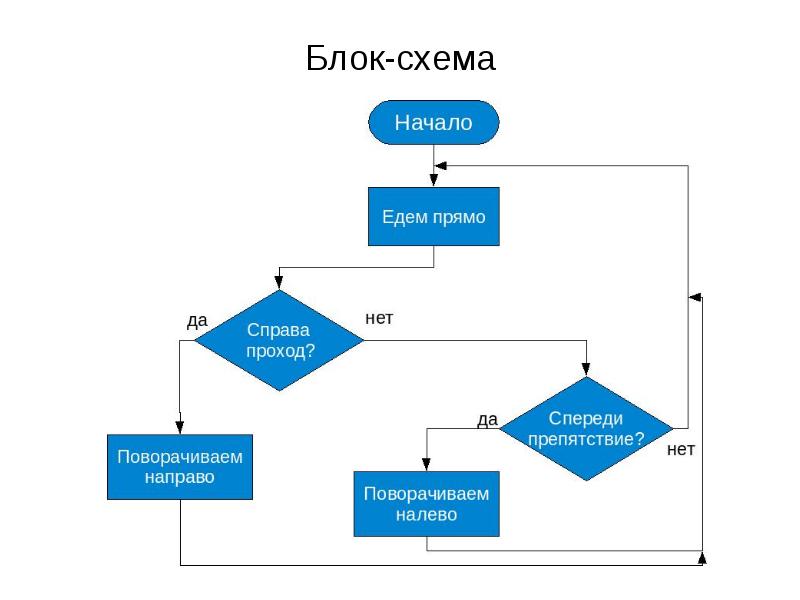
Описание принципа работы
Робот использует два датчика:
— датчик касания (кнопка) для определения препятствия спереди
— датчик расстояния (в нашем случае удьтразвуковой, который можно заменить на инфракрасный) для определения препятствия справа.
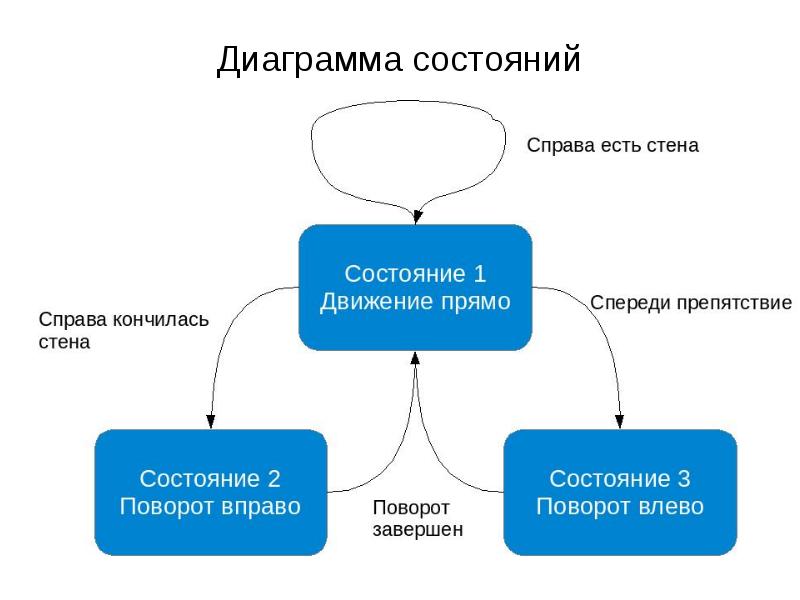
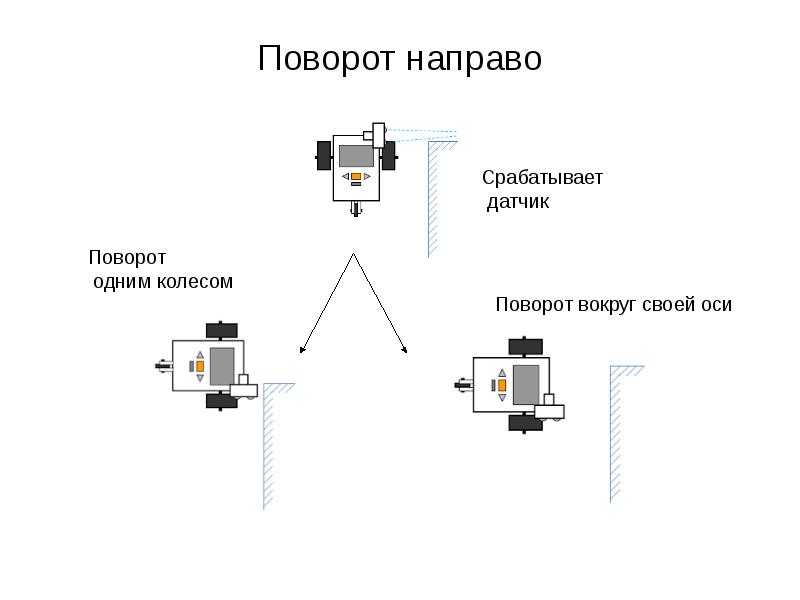
После старта программы робот начинает двигаться вперед вдоль препятствия справа. Если препятсвие далеко (более 4 см), то он поворачивает вправо, приближаясь к препятствию. Если препятствие близко (менее 4 см), то робот поворачивает влево, удалясь от препятствия. Таким образом робот все время движется вдоль препятствия справа на одном расстоянии. Если препятсвие справа отсутсвует (поворот), то робот старается найти его и поворачивает вправо, пока не обнаружит его.
Если же препятствие будет спереди, то при его достижении сработает датчик касания (кнопка). В этом случае робот отъезжает назад, поворачивается влево на 90 градусов и включает алгоритм движения вдоль препятствия. И так по циклу.
Если переставить датчик расстояния на другую сторону, то робот будет двигаться вдоль препятствия слева.
Мы собрали два примера лабиринта для демонстрации.
Это базовая модель, которую вы можете улучшить, изменив некоторые параметры программы или усовершенстовав конструкцию.
До встречи в роболабиринтах!
Читайте также: