Lego nxt mindstorms роботы
Обновлено: 28.04.2024
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Танцы с дронами
The Eleven Play используют в своих выступлениях квадролёты, которые могут двигаются синхронно с людьми-танцорами, повторяя движения последних, а могут выполнять в воздухе.

Костюм-экзоскелет для маленького ребёнка
Карстен Риеве из Германии создал для своей годовалой дочери впечатляющий костюм, вдохновившись экзоскелетом Caterpillar P-5000 Power Loader из фильма «Чужие» Джеймса Кэме.
Рубрика: Инструкции к роботу LEGO MINDSTORMS NXT 2.0
робототехника для начинающих
Внимание! Юные робототехники! Для Вас мы подготовили страницу с простыми и понятными инструкциями к нашему любому конструктору NXT!
Скачивайте и собирайте модели роботов из конструктора версии 8547 (robot lego mindstorms nxt 2.0).
Внешний вид коробки и руководство пользователя к конструкторам LEGO Mindstorm NXT версий 8527, 8547 и 9797 (выпускались до 2013 года):
Пошаговые инструкции для сборки разных моделей лего роботов (для конструктора версии mindstorm 8547)
| Инструкция по сборке робота АЛЬФАРЕКСа (артикул набора 8547)  Время сборки 4 часа (2 человека в группе). Рекомендуемый возраст для занятия робототехникой детям - 12-14 лет | Робот крокодил  Робот - крокодил (робогатор) | Робот пятиминутка  | Бот-внедорожник  | Трёхколёсный бот  | Конструируем робота "Пятиминутку" за 5 минут ;-) | Собираем и программируем Бот-внедорожник. Это уже более серьёзная модель, использующая датчик касания. | Создаём и тестируем Трёхколёсного бота. У этого робота ещё нет датчиков, но уже можно писать средние по сложности программы для управления двумя серводвигателями. | Линейный ползун  | Исследователь  | Нападающий коготь  | Добавляем к "роботу пятиминутке" датчик цвета и получаем из него настоящего "Линейного ползуна" и получаем робот с ИИ начального уровня! | Всем хорош "Бот-внедорожник": манёвренный, бронированный, умный. Ему бы ещё ультра-зрение бы добавить. Добавляем! Встречайте: Исследователь - вот вам бот с искусственным интеллектом среднего уровня! | Хищный атакующий робот, содержащий коготь, которым он может ударить в цель. Собираем, тестируем! | МАНТИ - застенчивый богомол  | Шарикопульт  | Робот-база с тремя двигателями  | Удивительное существо: робот-богомол. Постройте, загрузите базовую программу, порадутесь и погрустите вместе с МАНТИ! | Интересный миниробот под названием "Шарикопульт" очень простой, но может быть использован как дополнение к любому другому роботу. | Базовый робот с тремя двигателями может пригодиться для получения навыков строительства собственных блоков. Так как в базовом роботе нет ни датчиков, ни спец.механизмов. Вы все это можете сделать сами! | Двух кнопочный пульт ДУ  | Продвинутый Молот-автобот  | Простой светомер из лего  | В данном уроке можно научиться собирать двух кнопочный пульт дистанционного управления любым роботом, собранным из конструктора лего миндстормз! | Новенький проект "Молот-автобот"- это сложный в сборке и программировании робот. Но итоговая модель автомобиля-робота с молотом позволяет использовать 3 двигателя и 2 датчика! | Эксперименты с данным светомером позволят научиться использовать датчик света в своих роботах. | Робот СЕГВЭЙ с наездником  | Измеряем растояние длиномером  | автобот: гоночная машина из лего  | Даже робота СЕГВЭЙ (SEGWAY) можно построить из набора 8547. Инструкция доступна при клике на картинку. | Простейшее дополнение к роботу позволяет измерять пройденное им растояние. В статье описано как создать очень удобного робота-длиномера из робота пятиминутки. | Замечательная разработка! Автомобиль, да ещё какой! Есть возможность и удалённого управления, и "мозги", позволяющие принимать решения, считывая цветные линии на полу! Можно скачать - это АВТОБОТ! | Пятикнопочный пульт ДУ  | Супер пульт ДУ  | Миниавто с 3-х пультом ДУ  | Пульт ДУ можно использовать практически в любом своём проекте. Единственное требование - наличие двух конструкторов lego mindstorms nxt 2.0 | Супер пульт ДУ то уже мега-навороченный вариант для управления гоночным автомобилием или любым другим роботом MINDSTORMS NXT! | Забавная игрушка - миниавтомобильчик с трёх кнопочным пультом дистанционного управления |
Комплект из 9-и инструкций по лего роботам (robot lego mindstorms nxt 8547) под общим названием:

Мультибот . Кликните на картинку или просмотрите конструкции, приведённые ниже:
 Транспортное средство Этот транспорт является базовым для последующих робототехнических машин. Научитесь быстро собирать его прежде чем начнёте собирать более сложные механизмы. |  Гусеничное транспортное средство Собирается после того как вы собрали транспортное средство. Робот подходит для соревнований на силовое перетягивание каната. |  Гольфкар с лункой Собирается на базе гусеничного транспортного средства путём небольшой модернизации.
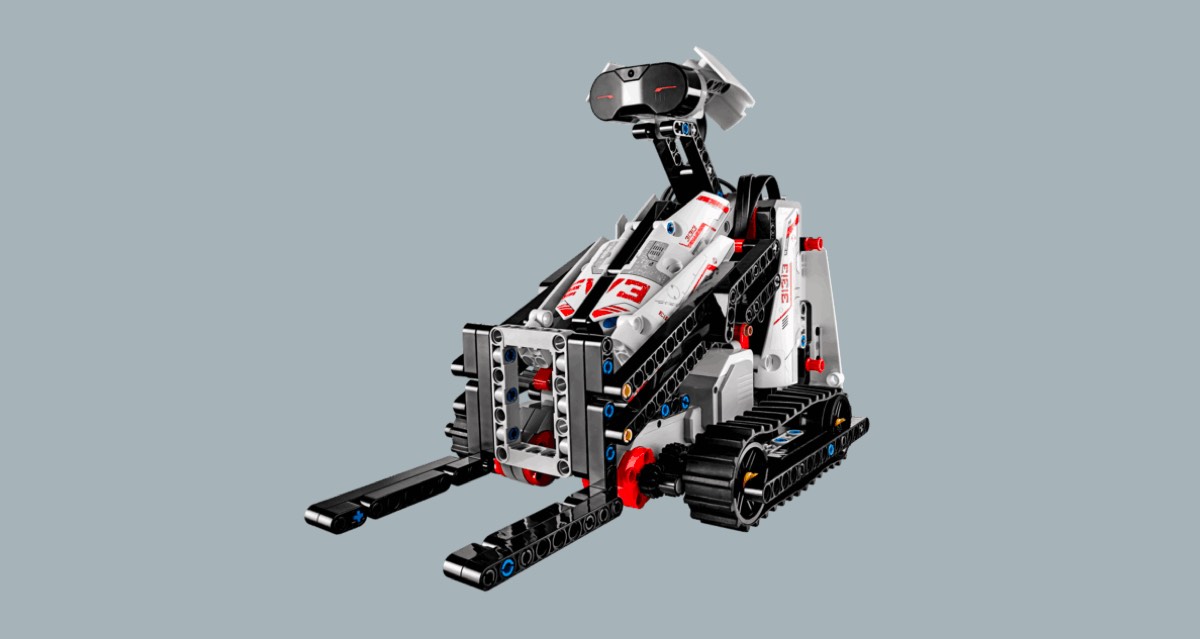
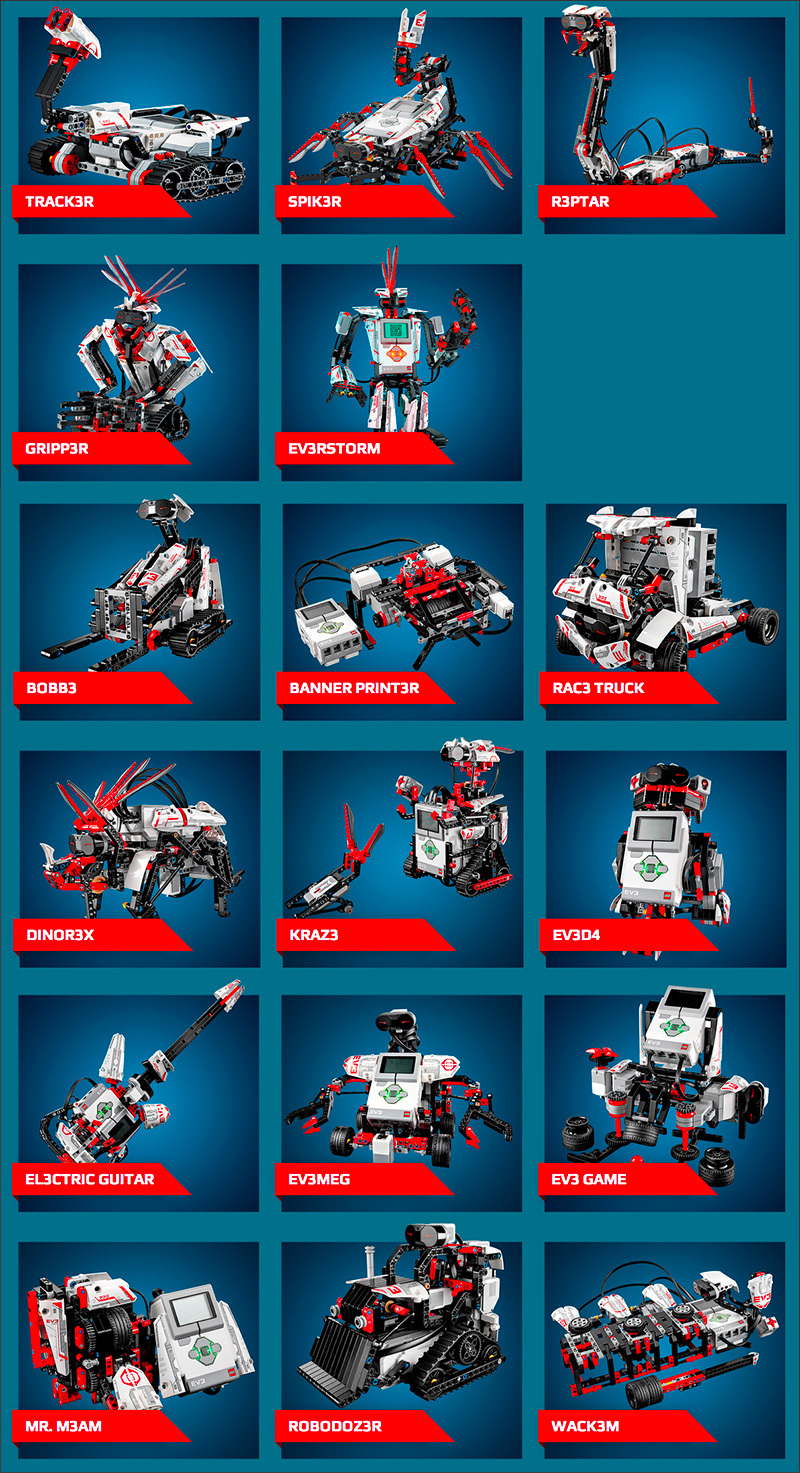
Эти роботы дадут тебе возможность в полной мере познакомиться с серией EV3. В комплекте идут инструкция по сборке, задания для программирования и инструмент программирования, собранные в новом приложении для программирования EV3. Новичкам в создании роботов рекомендуется начинать с этой модели. Если ты еще никогда не собирал роботов LEGO MINDSTORMS, мы рекомендуем начать с этого! TRACK3R представляет собой робота высокой проходимости на гусеничном ходу с четырьмя взаимозаменяемыми инструментами. Начни с создания корпуса робота, а затем познакомься с возможностями, которые дают 4 разных инструмента TRACK3R: измельчитель с двойным лезвием, разрушительная базука, захватная клешня и молот. Управляй роботом TRACK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.
Это шестилапое создание не только выглядит как скорпион, но и ведет себя соответственно. Он может резко развернуться, схватить предмет своей клешней-дробилкой, а хвост-молния готов дать отпор всему, что окажется на его пути. Управляй роботом SPIK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.
Один из самых популярных роботов R3PTAR (высота — 35 см) может скользить по полу как настоящая кобра и с нереальной скоростью атаковать предметы своими красными клыками. Управляй роботом R3PTAR с планшета или смартфона при помощи бесплатного приложения Robot Commander.
Робот GRIPP3R создан для поднятия тяжестей У него достаточно сил, чтобы своими мощными захватами поднять и кинуть жестяную банку. Управляй роботом GRIPP3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.
EV3RSTORM — самый усовершенствованный робот LEGO® MINDSTORMS®. Высокий уровень интеллекта и боевая мощь в сочетании с разрушительной базукой и вращающимся тройным лезвием делают робота EV3RSTORM непобедимым. Загрузи бесплатное приложение Robot commander LEGO® MINDSTORMS® и управляй роботом EV3RSTORM с планшета или смартфона.
Роботы, созданные фанатамиЭти роботы были созданы самыми преданными поклонниками; они могут стать источником нового необыкновенного опыта в сборке и программировании. Мы рекомендуем приступать к сборке этих моделей после того, как тебе удалось собрать 2–3 робота из основной серии. Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen) Роботом-погрузчиком Bobcat® с дистанционным управлением можно управлять при помощи кнопок ИК-маяка, заставляя его двигаться или поднимать предметы.
Разработчик Ральф Хемпел (Ralph Hempel) Это робот, который умеет рисовать? Точно! Используя обычный маркер, этот принтер рисует линии на бумаге для кассовых аппаратов. Воспользуйся существующей программой,чтобы написать LEGO EV3, или создай свою собственную, чтобы нарисовать всё, что захочется!
Разработчик Лоренс Валк (Laurens Valk). Хочешь грузовик с дистанционным управлением? Понятно! Крутой автомобиль для увлекательной игры. RAC3 легко модифицируется для движения с большей скоростью за счет дополнительных приводов; кроме того, к нему можно добавить специально собранный прицеп и использовать грузовик как средство для транспортировки.
Разработчик Лассе Стенбэк Лауесен (Lasse Stenbæk Lauesen). Очаровательный робот-трицератопс может передвигаться и поворачиваться на четырёх ногах.
Разработчик Марк-Андре Базергуи (Marc-Andre Bazergui) Этот робот — забавный сумасбродный компаньон, реагирующий на ИК-маяк своего друга-жучка. Вы можете управлять роботом KRAZ3 с помощью настраиваемой программы, ИК-маяка или запрограммировать его так, чтобы он двигался по комнате за своим другом-жучком. Разработчик Марк-Андре Базерги (Marc-Andre Bazergui)
Разработчик Вассилис Чриссантакопулос (Vassilis Chryssanthakopoulos) Робот, созданный по мотивам R2D2 из «Звездных войн», может общаться, следовать за владельцем или перемещаться по комнате туда, куда ему укажут, — через ИК-маяк. Он поддерживает большой набор сценариев, которые легко запрограммировать или расширить, используя новое программное обеспечение EV3.
Разработчик Даниэле Бенедеттелли (Daniele Benedettelli) Готов сыграть рок-н-ролл? На гитаре LEGO можно играть почти как на настоящем инструменте. Ударяй по одной струне, перебирай пальцами по безладовому грифу и создавай звуки, используя тремоло-систему, чтобы сыграть самые невероятные гитарные соло!
Разработчик Мартин Боогаартс (Martyn Boogaarts) Дружелюбный робот-помощник, у которого лучше всего получается перемещаться по линиям разного цвета при помощи датчика освещенности, который позволяет ему обнаруживать препятствия на своем пути и реагировать на них. Робот может перемещаться самостоятельно или управляться с помощью ИК-маяка.
Разработчик Рикардо Оливейра (Ricardo Oliveira) Этот робот хочет поиграть с тобой. Положи красный мяч под стаканчик, используй ИК-маяк, чтобы задать свой уровень, и посмотри, как робот меняет стаканчики. Теперь тебе нужно угадать, где же спрятан мяч? Предложи друзьям посоревноваться, кто быстрее всех найдет красный мяч!
Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen) Этот робот поможет рассортировать все имеющиеся у тебя балки LEGO®Technic. Просто вставь балку в механизм, а MR-B3AM определит её цвет и размер.
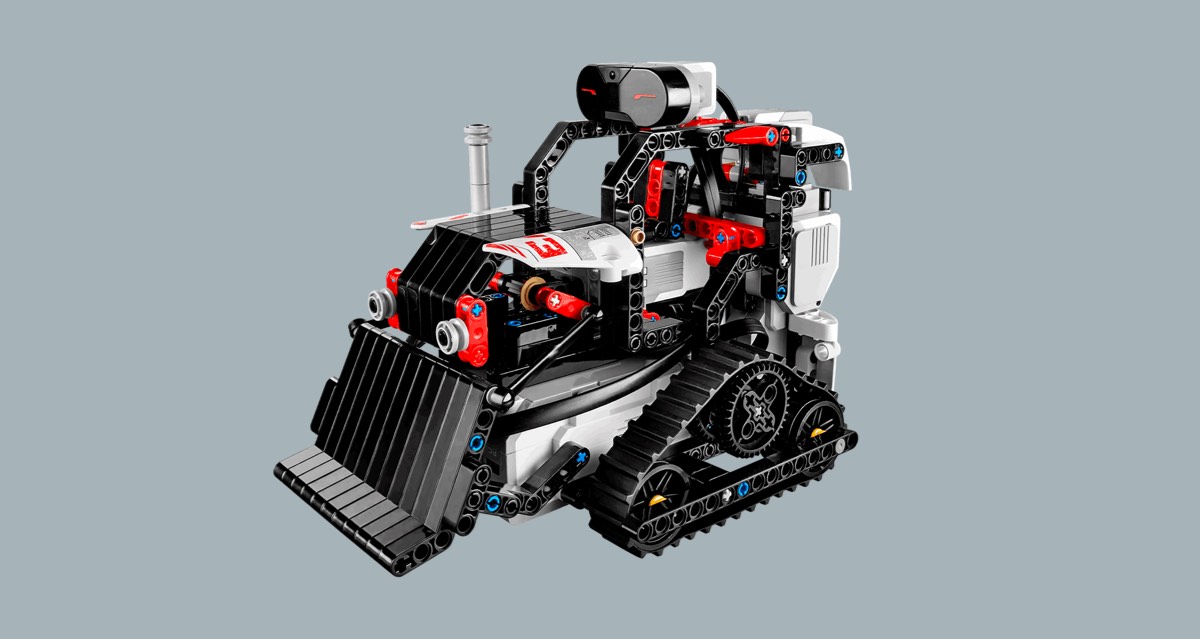
Разработчик Марк Кросби (Mark Crosbie) Этот робот-бульдозер управляется с помощью ИК-маяка, но может двигаться и самостоятельно, объезжая препятствия, пока расчищает дорогу и передвигает предметы своим бульдозерным ковшом.
Разработчик Мартин Боогаартс (Martyn Boogaarts) Эта игра в стиле традиционных игровых автоматов проверяет скорость реакции. Робот поднимет диски, а ты должен как можно быстрее ударить по ним молотком. Предложи друзьям устроить соревнование, чтобы выяснить, кто из вас быстрее всех!
Конкурс по сборке Remix ChallengeСобирай крутых новых роботов, смешивая детали LEGO® MINDSTORMS® с деталями своего любимого набора из серии LEGO Technic. LEGO MINDSTORMS и LEGO Technic — идеальное сочетание для создания совершенно нового семейства роботов LEGO с классным дизайном и интересными возможностями. Нажми на изображения ниже, чтобы изучить и построить модели-победители ежегодного конкурса LEGO Remix Challenge: «Часы с кукушкой», собранные из деталей наборов EV3 (31313) и «Грузовой вертолёт» LEGO Technic (42052), и DOODLEBOT, собранный из деталей наборов EV3 и «Экстремальные приключения» LEGO Technic (42069). Создавай собственные рисунки с помощью модели DOODLEBOT от LEGO® MINDSTORMS® или же переключи её в режим автопортрета, чтобы она нарисовала саму себя. Положи под руку робота чистый лист бумаги, дай ему карандаш и создавай свои шедевры, управляя им с помощью пульта ДУ EV3. Робот уже запрограммирован на три различных режима рисования. DOODLEBOT — победитель конкурса сборки моделей LEGO MINDSTORMS Remix Challenge 2017 года. Его построили из деталей двух популярных наборов: LEGO MINDSTORMS EV3 (31313) и «Экстремальные приключения» LEGO Technic (42069).
Неплохо, да?
Для справки — данная программа заставляет «танцевать» нашего робота под нечто, напоминающее музыку. Не буду спорить, программа совсем не сложна для понимания, но достаточно громоздка. И её можно заметно упросить, используя вместо написания кода на NXC специальный конвертер PyNXC. Иначе говоря, мы будем писать код на Python'е, а PyNXC будет преобразовывать его в NXC-код и загружать на устройство, избавив нас от необходимости писать громоздкий код на подобии Си.
Теперь наш робот научился разворачиваться на месте и, как только мешающий объект пропадет с поля его зрения, продолжать движение вперед. Как вы уже, наверное, заметили, программировать Mindstorms очень просто. Стоит также сказать, что помимо NXC и Python с использованием PyNXC, можно писать код на Java, Lua, Ruby, Ассемблере, а также, что логично, использовать ассемблерные вставки в других языках. Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.
Предвосхищая некоторые вопросы и комментарии читателей.Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота. Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4). Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая. Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести. Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это Краткий обзор платформ MRDS 4 и NI LabVIEW.Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
Краткий обзор набора LEGO NXT Mindstorms 2.0.
Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.
Рисунок 2 — Детали в форм-факторе LEGO Technic Пишем первое приложение.Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы. Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв. 1. Платформа MRDS 4.Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
Рисунок 3 — Среда программирования VPL Выполним следующую последовательность действий:
Рисунок 4 — Окно Connections
Рисунок 5 — Окно Data Connections
Рисунок 6 — Законченный вид диаграммы
2. Платформа NI LabVIEW.На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.
Рисунок 8 — Окна среды LabVIEW Мы будем использовать окно Block Diagram. Выполним следующие шаги:
Несмешной и баянистый анекдот, но нельзя просто так взять и начать эту публикацию не с него – он в лучшем виде отображает суть того, о чём пойдёт речь далее. Впрочем, из заголовка вы и так поняли, о чём речь.
Осторожно! Публикация может вызвать непреодолимое желание завести сына. Урок историиКомпания LEGO (название произошло от датской фразы «leg godt», «Играй с удовольствием») не нуждается в представлении – она была основана в далёком 1932 году, хотя первые знакомые всем пластиковые кубики появились значительно позже, в 1947. Примечательно, что кубики LEGO, выпускаемые в те годы, полностью совместимы с теми, что выпускаются сейчас. История создания компании, выпущенная компанией Pixar к 80-летнему юбилею LEGO: Сейчас компания производит около 20 миллиардов деталек в год, то есть более 630 штук в секунду. В текущем модельном ряду более 600 различных конструкторов и так уж получилось, что серия Mindstorms является своего рода вершиной технической мысли, самым-самым навороченным конструктором. Если вкратце, то она позволяет делать вполне себе полноценных роботов. Как гласит википедия, серия LEGO Mindstorms была впервые представлена в 1998 году. Через 8 лет (в 2006) на свет появился набор LEGO Mindstorms NXT 1.0, а уже в 2009 — набор LEGO Mindstorms NXT 2.0. Сегодня речь пойдёт о LEGO Mindstorms EV3 – последнем (третьем) поколении Отличия EV3 от NXT 2.0В принципе, главная идея осталась прежней – серия предназначена для сборки программируемых роботов. Поэтому первым встаёт вопрос, а что же поменялось с момента выхода предыдущего конструктора и стоит ли покупать новый? Основное отличие заключается в обновленных датчиках/моторах и, самое главное, в интеллектуальном блоке EV3 (EV означает EVolution):
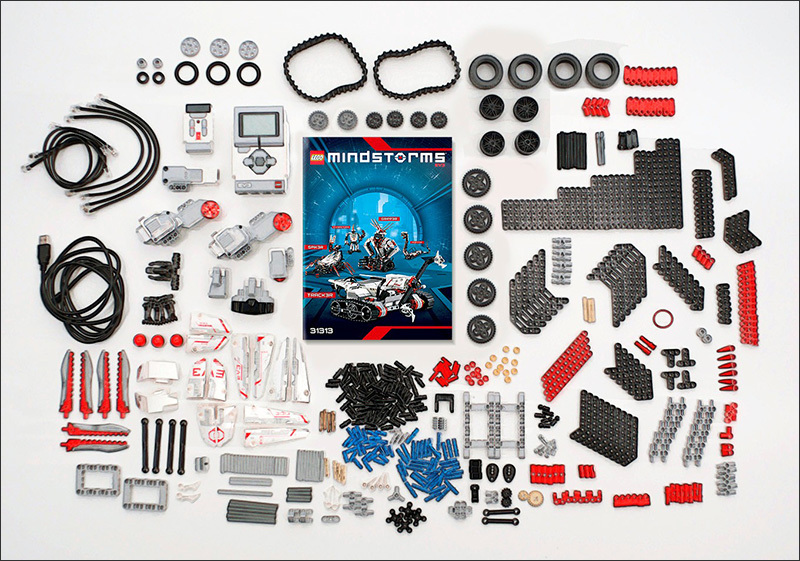
Ещё одно отличие заключается в том, что серия NXT продавалась в нескольких версиях (в разные годы) и представляла собой разные наборы, базовые и ресурсные. У нового EV3 с этим попроще – пока он продаётся в основном варианте – 31313 (601 деталь), из которого можно наделать кучу всего. Но при желании можно докупить базовый набор 45544 (541 деталь) с дополнительными сенсорами и детальками (использовать детали от обычных конструкторов также никто не мешает). Кстати, обратите внимание на пятизначные артикулы – на такую нумерацию компания перешла в 2013 году. Что касается совместимости, то тут было проделано всё возможное. Все NXT-сенсоры и моторы совместимы с EV3 и распознаются как NXT. EV3-сенсоры не работают с NXT, но EV3-моторы вроде как совместимы. NXT-кирпичик может быть запрограммирован софтом от EV3, но некоторые функции могут быть недоступны, а вот запрограммировать EV3-кирпичик NXT-софтом без сторонних решений не получится. Внутри коробкиЕщё когда я сам был маленький и ездил с родителями в центральный Детский Мир (когда он ещё был), на Лубянку – уже тогда я не мог оторвать глаз от коробок с LEGO. Тогда не было ни Гиктаймс, ни даже Хабра, но с тех пор коробки остались всё такими же яркими и сочными, даже во взрослом возрасте активируют процесс слюновыделения ) В этом плане другим производителям есть чему поучиться.
Часть коробки, на самом деле, представляет собой (если её разрезать) трассу с различными цветовыми зонами, которую можно использовать для роботов с сенсорами цвета. Все детальки аккуратно разложены по пакетикам, в комплекте – инструкция и набор наклеек. Давайте вкратце пройдёмся по тому, что положили в комплект.
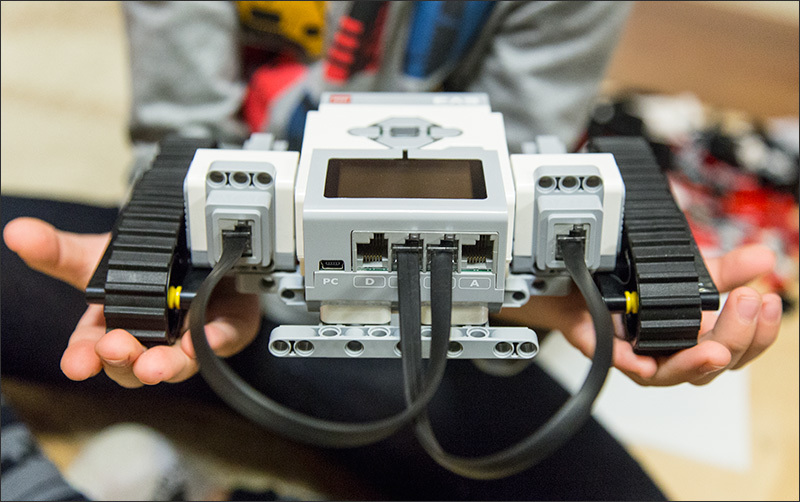
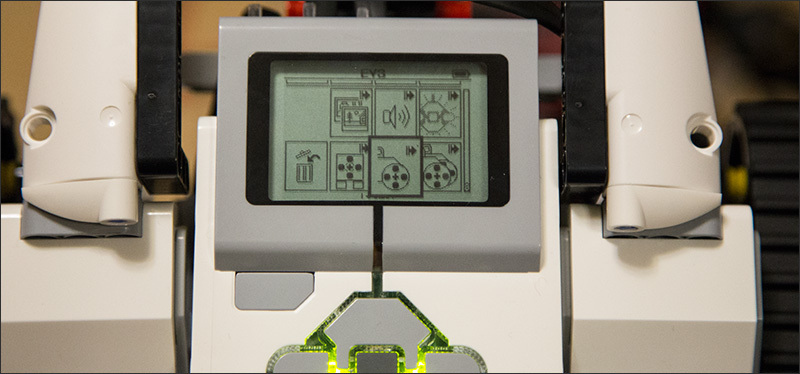
Сам EV3, он же интеллектуальный блок, он же сердце системы, он же «кирпичик» или «кубик». Служит центром управления и энергетической станцией для вашего робота и имеет следующие функциональные элементы:
– Многофункциональный монохромный дисплей с разрешением 178х128
Кубик EV3 также поддерживает Bluetooth, WiFi (через USB-адаптер NETGEAR WNA1100 Wireless-N 150), для связи с компьютерами имеет программный интерфейс, позволяющий создавать программы и настраивать регистрации данных непосредственно на микрокомпьютере EV3. » Большой EV3-сервомотор (2 штуки). Cоздан для работы с микрокомпьютером EV3 и имеет встроенный датчик вращения с точностью измерений до 1 градуса. Используя этот датчик, мотор может соединяться другими моторами, позволяя роботу двигаться с постоянной скоростью. Кроме того, датчик вращения может использоваться и при проведении различных экспериментов для точного считывания данных о расстоянии и скорости.
– Встроенный датчик вращения с точностью измерений до 1 град » Средний EV3-сервомотор. Идеален для задач, когда скорость и быстрота отклика, а также размер робота важнее его грузоподъёмности.
– Встроенный датчик вращения с точностью измерений до 1 градуса » Датчик цвета (EV3). Способен определить 8 различных цветов, хотя также может использоваться как датчик освещённости.
– Измеряет отраженный красный свет и внешнее рассеянное освещение, от полной темноты до яркого солнечного света » Датчик касания (EV3). Позволяет роботу реагировать на касания, распознает три ситуации: прикосновение, щелчок и освобождение. Также способен определить количество нажатий, как одиночных, так и множественных. » Цифровой ИК-датчик (EV3). Для определения приближения робота. Также способен улавливать ИК-сигналы от ИК-маяка, позволяя создавать дистанционно управляемых роботов, навигационные системы для преодоления препятствий.
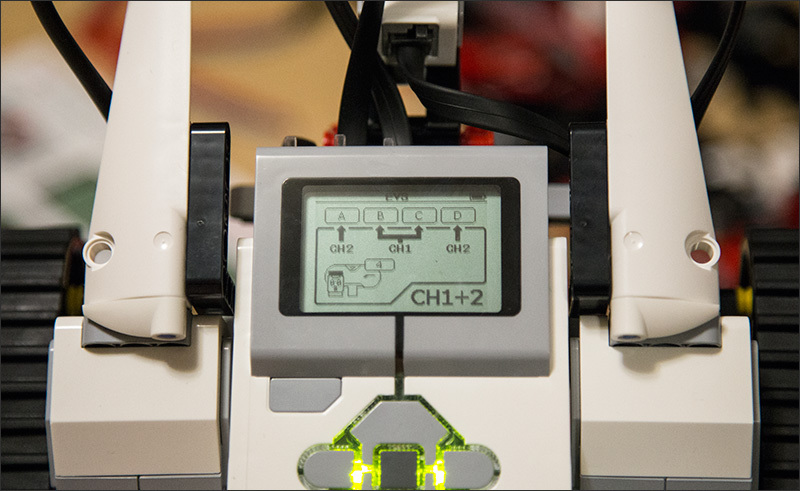
– Измерения приближения/удаления в радиусе 50-70 см » Удалённый инфракрасный маяк. Разработан для использования с ИК-датчиком EV3. Маяк излучает ИК-сигнал, улавливаемый датчиком – может использоваться в качестве пульта дистанционного управления микрокомпьютера EV3, передавая сигналы на ИК-датчик. – До 4 индивидуальных каналов передачи сигнала (переключатель прямо на корпусе) В отдельном пакетике смотаны провода для подключения датчиков и моторов к кубику, а также USB-шнур для подключения кубика к компьютеру.
Стоит отметить два важных момента. Во-первых, существуют другие датчики Lego, такие как: » Гироскопический датчик (EV3). Цифровой гироскопический датчик EV3 позволяет измерять движение вращения робота, а также улавливать изменения в его движении и положении. Режим измерения углов с точностью до ± 3 градуса; встроенный гироскоп улавливает вращения с моментом до 440 град/с; частота опроса до 1 кГц. » Ультразвуковой датчик (EV3). Генерирует звуковые волны и фиксируюет их отражения от объектов, тем самым измеряя расстояние до объектов. Также может использоваться в режиме сонара, испуская одиночные волны. Может улавливать звуковые волны, которые будут являться триггерами для запуска программ. Измеряет расстояния в пределах от 1 до 250 см, а точность измерений составляет ± 1 см. А во-вторых, поддерживаются сенсоры и прочие аксессуары от сторонних производителей, таких как HiTechnic и Mindsensors – они предлагают всевозможные джойстики, инфракрасные датчики расстояний, магнитные датчики, компасы, гироскопы, акселерометры, таймеры, мультиплексоры, шаровые опоры, и т.д. Так что, если задаться вопросом, можно найти много всего интересного.
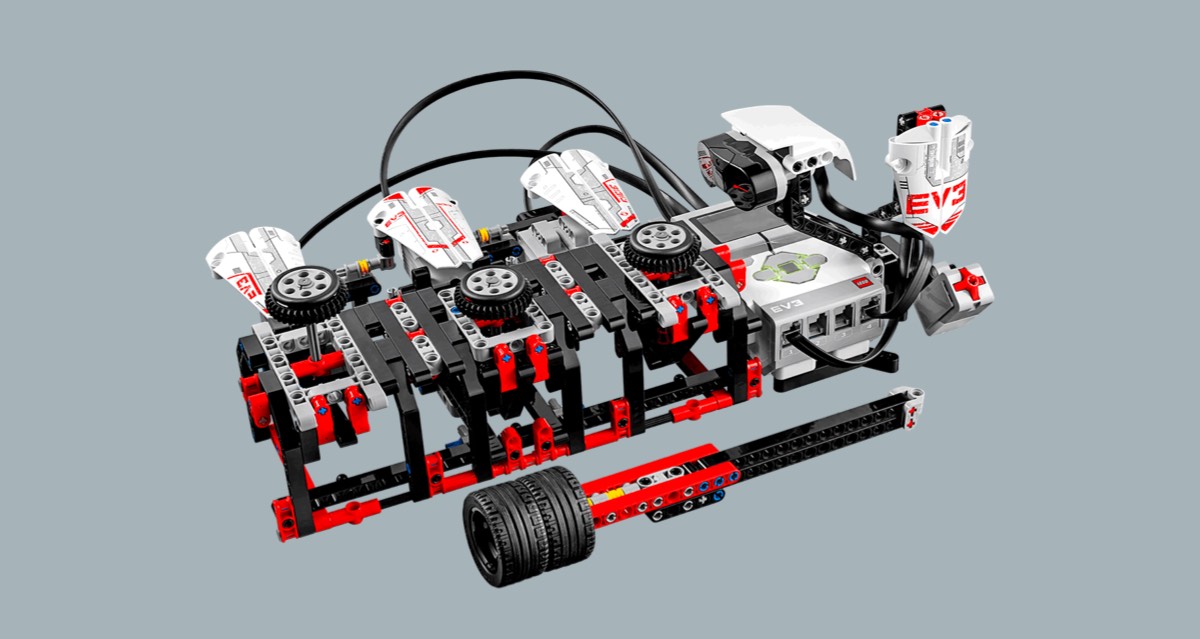
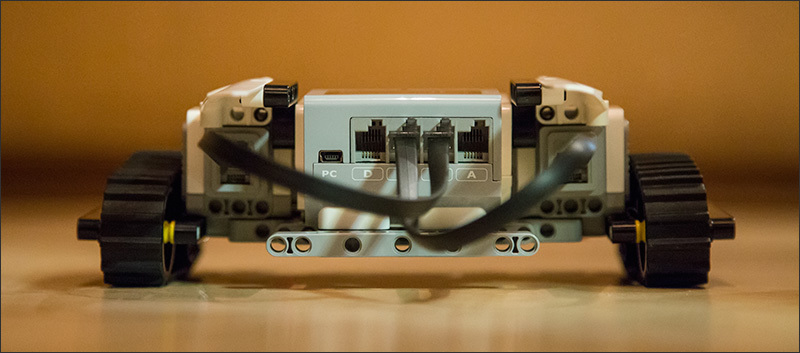
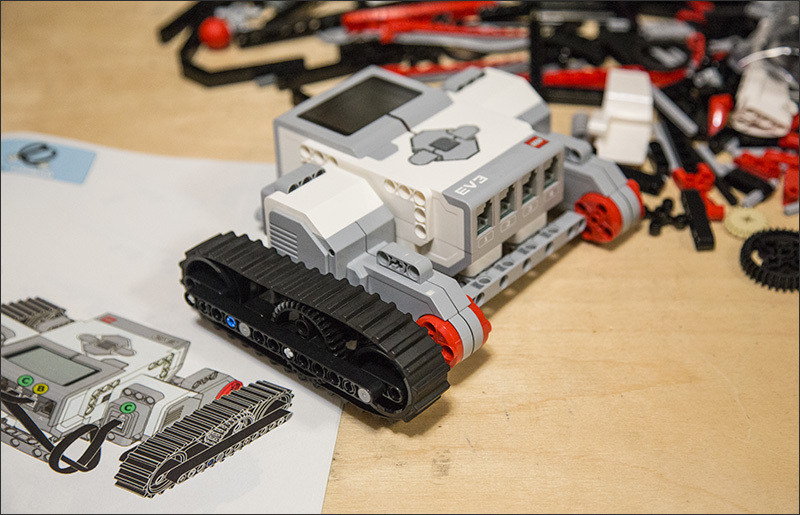
В общем, как вы уже поняли, LEGO – это для реальных пацанов! Первая модельВ комплекте с конструктором идёт бумажная инструкция, по которой можно собрать одну-единственную модель – некое подобие гусеничной самоходной машины.
Сначала я удивился, ведь даже в самых простых наборах (серии типа LEGO Creator) всегда идёт несколько инструкций, а тут вдруг бумаги пожалели или места в коробке не нашли. Оказалось… что только на официальном сайте из набора деталей предлагается собрать 17 разных роботов! Поэтому 17 инструкций в коробке были бы действительно лишними (и для логистики, и для лесов природы). Вот названия роботов: EV3RSTORM, GRIPP3R, R3PTAR, SPIK3R, and TRACK3R. ROBODOZ3R, BANNER PRINT3R, EV3MEG, BOBB3, MR-B3AM, RAC3 TRUCK, KRAZ3, EV3D4, EL3CTRIC GUITAR, DINOR3X, WACK3M, и EV3GAME – инструкции для них придётся качать из инета, равно как и софт для подключения EV3 к компьютеру.
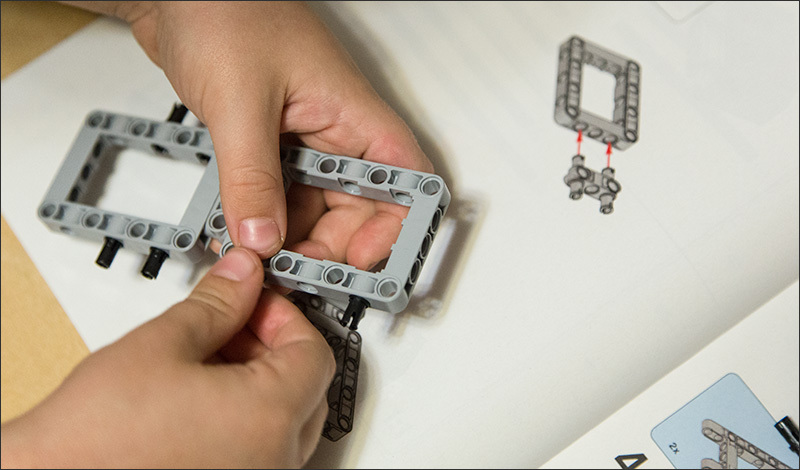
Инструкция наиподробнейшая, накосячить сложно. Сын сказал , что детали в пакетиках расфасованы не очень удачно – на первой же странице может потребоваться вскрыть 3 разных пакета, но это тоже мелочи.
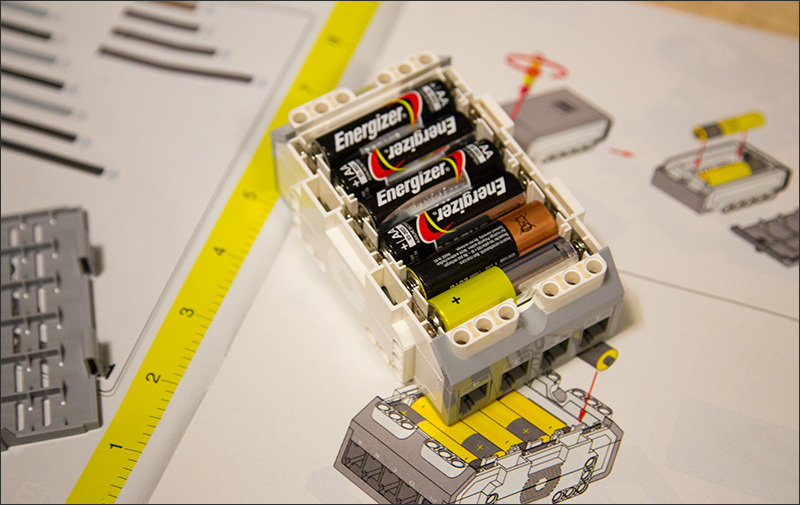
Кубик EV3 необходимо запитать, для чего можно использовать аккумулятор (нет в комплекте) или 6 пальчиковых батареек. Забегая вперёд – ещё 2 батарейки (но уже мизинчиковых) понадобятся для питания ИК-маяка (он же пульт ДУ).
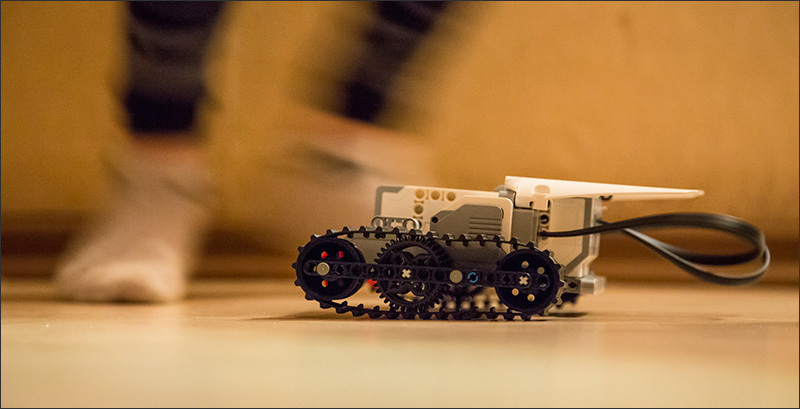
Первую модель ребёнок (7 лет) собрал примерно минут за 30.
Процесс оказался не таким увлекательным, как, например, сборка моделей LEGO Technics – в инструкции предлагается собрать далеко не самого интересного робота: в нём лишь крупные детали, среди которых были практически все датчики и двигатели – видимо, чтобы продемонстрировать работу каждого из них.
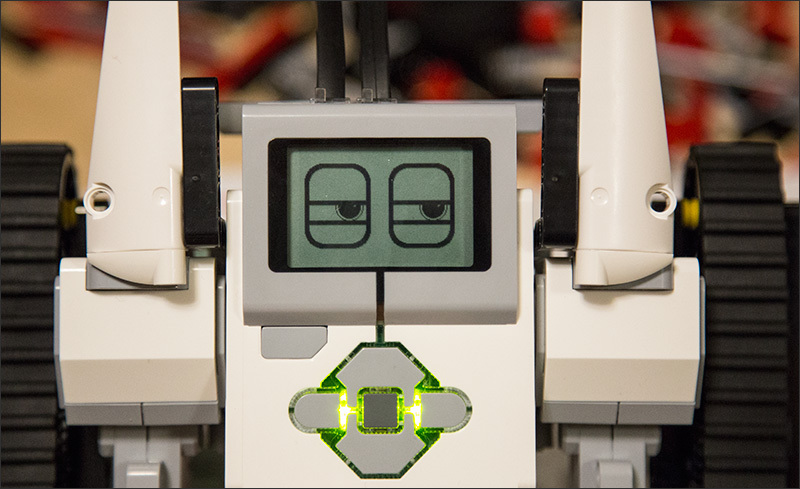
Но вот результат превзошёл все детские ожидания – впервые он собрал модель, которая могла двигаться сама: вперёд-назад, поворот, разворот на месте, крутила щупальцами…
Запуск осуществляется с кубика EV3, для чего следует нажать пару кнопок на лицевой панели. Некоторые действия можно запрограммировать прямо на кубике: выбрать количество итераций, настроить подачу звукового сигнала и так далее – в одной статье всего не рассказать, курите мануалы.
Программировать через компьютер собранную выше модель не пришлось. Тем не менее, возможность такая есть, при этом на разных уровнях хардкорности. Ребёнку проще всего будет начать с предлагаемого производителем софта, который есть как под Windows, так и под OS X. Во втором случае дистрибутив весит 666 Мб, а установленное приложение займёт гигабайт. Оно называется LEGO Mindstorms EV3 Home Edition и разработано совместно с небезызвестной компанией LabView. На сайте LEGO довольно много обучающих программированию материалов. Сразу после запуска перед нами возникает интерактивный «гараж» из роботов, которых можно собрать из набора: Нельзя ещё раз не отметить, что кубиком EV3 можно управлять со смартфона на операционных системах Android или iOS, для чего есть отдельные приложения. Если всего этого оказалось мало, можете повысить градус хардкора. Для кубика EV3 существуют различные прошивки, которые позволяют расширить его возможности, скорость работы и т.д. Вот, например, альтернативная прошивка leJOS EV3 – прошивка с jvm, позволяющая программировать EV3 на языке Java. Хотите на другом языке? Окей, гугл – в вашем распоряжении почти 60 вариантов на выбор: ASM/C/C++/Perl/Python/Ruby/VB/Haskell/Lisp/Matlab/LabVIEW и многое-многое другое. Более подробно об этом я рассказывать не буду по нескольким причинам: во-первых, программист из меня полный false (все надежды на сына), во-вторых, пока мы успели собрать только одну модель (и на выходных возьмёмся за вторую), а в-третьих – вы уже и так оформили заказ на этот конструктор и скоро сами всё узнаете ;) Ну а если серьёзно, то статья и так уже огромная – вот лучше две ссылочки изучите: раз и два. Ну и ещё большой плюс – это LEGO-сообщества, которых полно по всему миру. Можете быть уверены, что на любом из этапов экспериментов с роботами вы всегда сможете найти единомышленников и тех, кто сможет помочь с решением проблемы. Помимо дружелюбных сообществ, на просторах сети выложено огромное множество различных инструкций, моделей, исходников, видеороликов и обучающих материалов. Всё это означает одно: с Mindstorms вы не соскучитесь. Читайте также:
|