
Механизм поворота колес лего
Обновлено: 06.05.2024
Инструкция: передний мост для машины. [lego technic]
Видео Инструкция: передний мост для машины. [lego technic] канала SGLI
как сделать передний мост из лего техник инструкция
Независимая Передняя Подвеска с Рулевым Управлением из ЛЕГО ТЕХНИК + ИНСТРУКЦИЯПодробнее
лего техник передний мост без рулевой рейкиПодробнее
Лего техник самоделки:№40 Как собрать передний мост с приводом из ЛЕГО?Подробнее
Лего техник полнопривадный передний мост!!Подробнее
САМЫЙ ПРОСТОЙ И НАДЁЖНЫЙ ПЕРЕДНИЙ МОСТ С ПРИВОДОМ И АККЕРМАНОМ ИЗ ЛЕГО ТЕХНИК ЗА МИНУТУ (ИНСТРУКЦИЯ)Подробнее
Передний мост с приводом и большим углом поворота колес из лего техник ОбзорПодробнее
Kamaz 53605 из Lego Technic. Обзор моей лучшей самоделкиПодробнее
Лего техник краулер начало постройки часть 1/Lego technician crawler starting construction part 1Подробнее
Передний мост с приводом и большим углом поворота колес из лего техникПодробнее
идея для переднего моста из Лего техникПодробнее
Как сделать задний мост? Лего техник для начинающихПодробнее
Мод на набор 42095 из лего техник! ИнструкцияПодробнее
Лего техник самоделки:№36 Как собрать переднюю независимую подвеску с приводом из ЛЕГО?Подробнее
Как собрать переднюю независимую подвеску с приводом/инструкцияПодробнее
Как сделать из LEGO Technic передний мост без рейкиПодробнее
Полный привод 4WD | Гайды LEGO Technic | ИнструкцияПодробнее
Передний мост,поворотный механизм из лего техник без зубчатой рейки.Обзор+инструкцияПодробнее
Передний мост с приводом и большим углом поворота колес из лего техник.ОбзорПодробнее
Инструкция: передний мост для машины. [lego technic]
Видео Инструкция: передний мост для машины. [lego technic] канала SGLI
Лего-техник или как сделать лего-авто своими руками.
Решил поделиться своим хобби.
Мне, Семейному человеку в гараже пропадать некогда, да и руки у офисного работника совсем атрофировались что-ли
В общем, решил «сына к технике приучать» на конструкторе. Почему в кавычках, потому что оказалось что я сам не наигрался в детстве.
Куча разной резины и дисков, рычаги подвески, шестеренки, карданы, дифференциалы — все это было и в 90-х годах, хотя до нас доходило дороговато. Однако прогресс не стоит на месте- сейчас появилась куча разной электрики: пульты, моторы разных типов, сервы, приемники. Это то, чего так не хватало в детстве точнее это было, но не в конструкторах — приходилоь выковыривать из игрушек и кое как крепить к конструктору. Чаще всего неудачно.
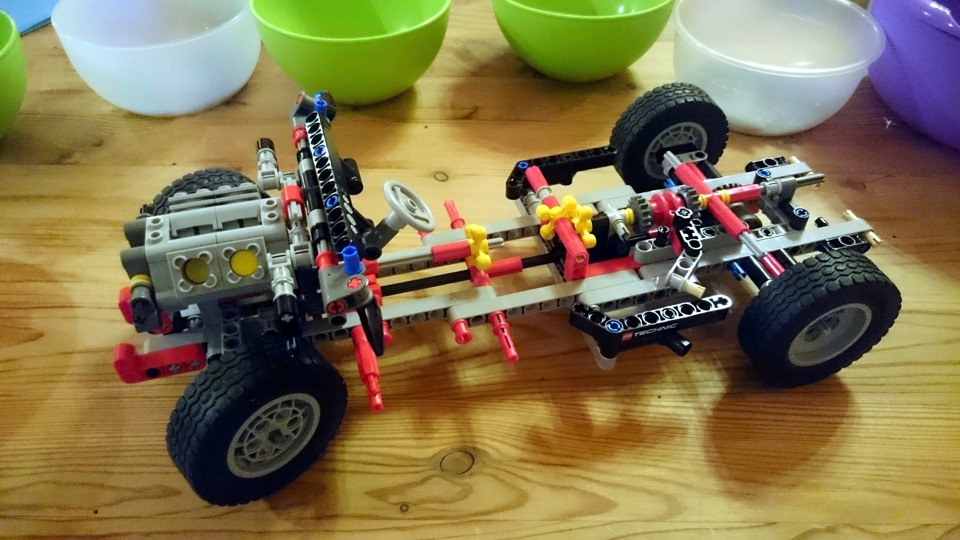
Тойота Прадо, 150 кузов. Трансмиссия кастомная (дальше прочтете -поймете)
Размеры: 67х31х29 см, вес 2480 г.
Масштаб 1 : 9,5
Спеки:
1. рамная конструкция
2. передняя независимая подвеска, задняя зависимая подвеска (неразрезной мост)
3. работающее рулевое управление (руль)
4. передние сиденья двигаются и меняют наклон спинки, задние скалдываются по частям/полностью/только подлокотник как в реале
5. открываются все двери багажник и капот как на настоящей модели, в т.ч. отдельно стекло двери багажника
6. ручная 5 ступенчатая коробка передач + задняя передача
7. двигатель V6, подключен к трансмиссии через коробку передач- поршни двигаются при катании авто
8. система постоянного полного привода с возможностью отключения переднего моста. Отключение/подключение рычагом из салона
9. блокировка межосевого диффернциала рычагом из салона
10. блокировка заднего диффернциала рычагом из салона
Понижайка не влезла
В данный момент автор принимает участие в ФИНАЛЕ МЕЖДУНАРОДНОГО Лего-Техник конкурса, как ЕДИНСТВЕННЫЙ представитель от России и СНГ. Модель победителя конкурса будет выпущена компанией Lego и поступит в продажу эксклюзивным Limited edition набором 01.08.2013!
Моя модель — краулер на базе Muscle Car. Модель имеет
-полный привод,
-две поворотные/управляемые оси,
-мосты с большим ходом подвески,
— моторизированную лебедку способную поднять авто вертикально
— работающие фары.
Дифференциалы отсутствуют, лазит хорошо. Все это управляется дистанционно.
фото машины для конкурса
видео машины для конкурса


Роботы и механизмы в Lego запись закреплена
Роботы и механизмы в Lego запись закреплена
Роботы и механизмы в Lego запись закреплена
ОСЕВАЯ ФОРМУЛА ПАРОВОЗА
Осевая формула — набор цифр, который определяет тип паровоза по количеству, назначению и расположению осей колёсных пар в экипажной части локомотива.
В классической конструкции паровоза встречаются три основных вида колёсных пар или осей:
Показать полностью.
1. Бегунковые колёсные пары (направляющие колёсные пары) — служат для улучшения вписывания паровоза в кривые. При прохождении паровозом кривых направляющие оси отклоняются в сторону поворота и тем самым снижают вероятность схода с рельсов и уменьшают нагрузку от основных колёс на рельсы в поперечном направлении. Колёса этих осей, как правило, имеют значительно меньший диаметр, чем на спаренных осях. Чаще всего встречаются на быстроходных, пассажирских паровозах.
2. Движущие колёсные пары (сцепные колёсные пары, сцепные оси, движущие колёса и т.д.) — служат для реализации тягового усилия генерируемого двигателем. Присутствие их на любом паровозе обязательно. Поскольку частота вращения механически связанных колёс одинакова, диаметр их тоже должен быть одинаков. Как правило, это самые большие по диаметру колёса на паровозе. В общем случае чем больше мощность локомотива, тем большее количество движущих колёсных пар на нём применяется.
3. Поддерживающие колесные пары — служат для перераспределения нагрузки на рельсы, в том числе для снижения нагрузки на ведущие оси до допустимых значений. Колёса этих осей, как правило, имеют значительно меньший диаметр, чем движущие колёса. На паровозах встречаются не всегда.
Способы записи осевых формул отличаются в разных странах. Русский способ, который аналогичен Американскому, где запись производится цифрами в порядке: Бегунковые - Движущие - Поддерживающие
Например, 1-4-1 для паровоза из LEGO ниже можно проиллюстрировать схемой оООООо

Сообщество для публикации самоделок, не зависимо от навыков самодельщика.
Данная группа находится под стражей Альянса






BARABRO LEGO TECHNIC запись закреплена
Всем привет это моя новая самоделка гипертрофированная восьмерка. Сначала проект начинался с того , что я хотел сделать Лада Самару Т-3. Вообщем получилось смесь восьмёрки багги и раллийного автомобиля . В первые дни я сделал заднюю и переднюю подвески.
После у меня что-то пропал интерес делать кузов хэтчбек. Я решил сделать кузов в стиле раллийного спортивного купе.
Показать полностью.
И вот что собственно получилось.
Из функций:
1- езда
2-поворот колес
Из детелизации:
1-воздухозапорники
2-запаска
3-дополнительная люстра на крыше
4-дополнительные свет над фарами
5-колпаки на колёсах
6-крутой выхлоп.
Привод осуществляется за счёт двух л моторов через понижение 12 на 20 и снова через угловую передачу с помощью кнобов. Дальше на перед идёт понижение 12 на 20. И через три ряда восьмезубых шестерёнок и снова через угловую передачу 1 к 1-ому передается вращение на колёса. Спереди независимкас с бортовыми редукторами.
А сзади используется схема с плавающими дифференциалом. Только вместо дифференциала здес угловая передача 12 на 20.
Поворот колес осуществляется за счёт большого Мулд Кинг мотора . Только он теперь маленький потому что я его разрезал . Всем спасибо.


Воздухозапорники

Приветствую, друзья и поздравляю с открытием нашего Сообщества.
Для начала хочу вам показать мою последнюю доработку стандартной модели. В деле самостоятельного автомобилестроения я пока новичок. Только-только начинаю познавать азы.
Приобрел недавно б/у эвакуатор. Вот такой:

Был он простым, без электрификации, катался и поворачивал с помощью мускульной силы.
Рама простая:
В собранном виде:

Решил я сделать из него дистанционно-управляемую модель. Сколько смотрел в интернете — не особо ее любят переделывать, а если и переделывают, то колхозно. Мне же хотелось сделать все аккуратно, с минимальными внешними отличиями. В процессе апгрейда модель почти полностью разбиралась:
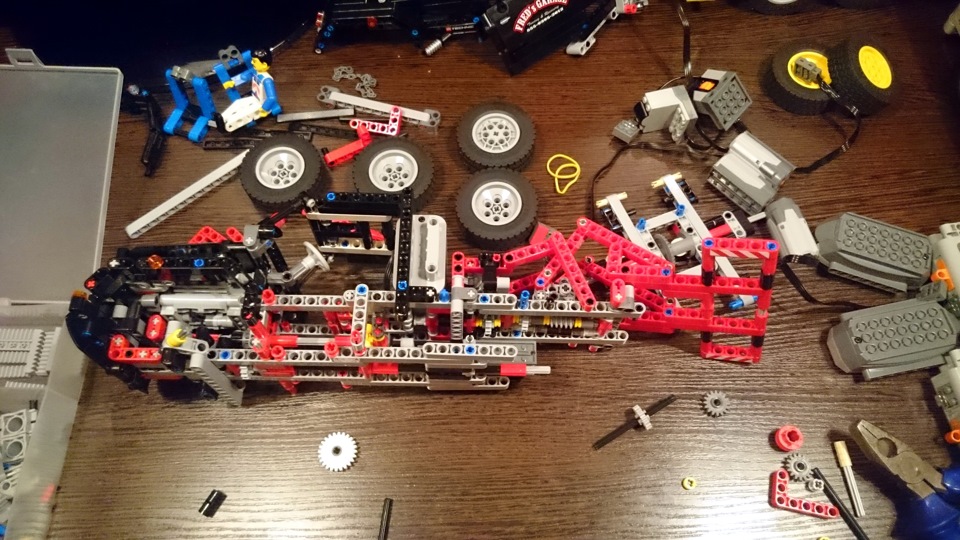
Целых два полноценных вечера ушло на то, чтобы моторизировать лебедку и подъемный механизм. На это ушло 2 L-мотора. Моторы расположил в базе.
Всю субботу подключал моторы к рулю и к прямолинейному движению. Делал несколько вариантов т.к. хотелось оставить имитацию функционирующего двигателя (когда крутятся колеса — поршни в двигателе работают).
Опять же, проблема и в подборе шестерен для передачи крутящего момента. В первый раз установил двигатель напрямую на поворот и в итоге колеса поворачивались с бешеной скоростью — я не мог уловить и выставить их прямо. Вторая попытка была с использованием шестерен разного диаметра, чтобы замедлить итоговый момент поворота колес. Но он оставался все равно высоким. Третий вариант рулевого механизма был с использованием червячной передачи. С этим скорость поворота колес снизилась до вполне приемлемой.
В итоге имеем 4 мотора, 2 приемника сигнала, 1 батарейный блок и 2 пульта. Все моторчики находятся в базе, имитация двигателя работает, салон присутствует.
Для одновременного управления двумя моторами Lego EV3 в зеленой палитре блоков программирования существует два блока:
Блок «Рулевое управление»

Рулевое управление
Блок «Независимое управление моторами»

Независимое управление
Блок рулевого управления третий слева в блоках «Действия» палитры блоков EV3. Блок независимого управления четвертый по счету. Режимы управления у блоков одинаковые. Всего есть пять режимов работы:
Эти пять режимов аналогичны режимам работы среднего и большого мотора и подробно описаны в статьях «Большой мотор EV3» и «Средний мотор EV3», поэтому останавливаться на режимах работы и режимах остановки не имеет смысла.
Блок программирования «Рулевое управление»
При помощи блока «Рулевое управление» робот может двигаться вперед, назад, по траектории, останавливаться. При рулевом управлении моторы могут передвигаться со скоростями от – 100 условных единиц до 100 условных единиц. Это позволяет моторам вращаться в разных направлениях.
Есть два входных параметра для управления блоком – мощность и рулевое управление.
Эти значения можно указывать непосредственно на блоке. Также можно задавать значения при помощи проводников. Такое управление часто используется для соревнований автономных роботов.

Параметры входа
Максимальную скорость моторов можно задать любую. Значения рулевого управления, т.е. повороты, задаются ползунком. На рисунке приведен пример, где скорость или мощность равна 50 условных единиц, а значение рулевое управление установлено 20 условных единиц.
Это значит, что максимальная скорость левого мотора будет 50, а правого меньше. При таких заданных значениях робот совершает правый поворот. Если изменять положение ползунка, то будет изменяться вид стрелки и значение рулевого управления. Можно сказать, что блок «Рулевое управление» напоминает рулевое управление обычных автомобилей.

значение рулевое управление
Отличие заключается в том, что в обычном автомобиле поворот осуществляется за счет поворота колес при одинаковой скорости ведущих колес, а у роботизированной платформы поворот происходит за счет разной скорости моторов.
Недостатком такого управления является трудность вычисления угла поворота. Поэтому часто значение рулевого управления подбирается опытным путем.
Блок программирования «Независимое управление»
В этом блоке реализована возможность одновременного управления двух моторов с одинаковой скоростью или различными скоростями. Выбор порта для моторов происходит, если щелкнуть по букве в верхней части блока.

выбор порта выхода
Если у нас левый мотор подключен к порту В, а правый к порту С, то при значениях В = 100 и С = -100 происходит разворот на месте в правую сторону с максимальной скоростью. При В = 100 и С = 0 робот поворачивается вокруг правого неподвижного колеса. При В = 100 и 0 < С < 100 происходит движение роботизированной тележки по дуге.

повороты «Независимое управление»
При помощи этого блока можно легко задавать траектории движения и точно вычислять радиусы разворотов. Блок «Независимое управление» моторами очень похож на управление танком, трактором или любой другой техникой где повороты осуществляются за счет разных скоростей левых и правых гусениц или колес.
Читайте также: