
Механизмы чебышева из лего
Обновлено: 28.04.2024
Пафнутия Львовича Чебышёва не зря считают одним из двух самых значимых русских математиков XIX века (второй, конечно, Лобачевский). Теории чисел, вероятностей, ортогональных многочленов… в этих и многих других теориях его стараниями были достигнуты результаты, что называется, фундаментальные, давшие базу другим математическим работам на многие годы вперед.
Но, помимо выдающихся теоретических изысканий, этот удивительный человек тратил свое время и собственные средства на то, чтобы сконструировать придуманные и разработанные им же механизмы — из дерева и железа. Всего им изобретены более сорока механизмов и около восьмидесяти модификаций для них. В современном мире многие из них применяются в авто- и мото- устройствах.
"Лямбда-механизм" Черышёва - четырехрычажный механизм, который преобразует вращательное движение в прямолинейное
"Лямбда-механизм" Черышёва - четырехрычажный механизм, который преобразует вращательное движение в прямолинейное
Теоретически разработанным «Механизмом Чебышёва» называют такой, который преобразовывает вращательное движение в движение, приближенное к прямолинейному. Исследуя проблемы кинетических механизмов, Пафнутий Львович сумел решить проблему такого преобразования.
Кроме этого механизма устройства Черышёва регулярно участвовали в мировых выставках и всегда успешно: в 1876-ом это была конструктивно более совершенная паровая машина, в 1893-ем - «самокатное кресло»: прообраз инвалидной коляски, а еще были автоматический арифмометр непрерывного действия, сортировалка для зерна и семь различных механизмов, преобразовывавших вращения в разные виды движения.
Многие эти устройства до сих пор экспонируются в различных музеях мира, а «стопоходящая машина» хранится в Политехническом музее г. Москвы.
А вот еще несколько интересных фактов : именем Чебышёва назван построенный в 2008 г. суперкомпьютер «СКИФ МГУ Чебышёв» (на базе тысячи двухсот пятидесяти четырехъядерных процессоров),пиковой производительностью порядка 60 Тфлопс. А еще его именем назван кратер на Луне и астероид.
Если вам понравился материал, пожалуйста, ставьте лайки и подписывайтесь на канал. Это не сложно и бесплатно, но очень важно для развития "НМ". А еще нам нужны репосты в соцсети!
В данной работе ребята соберут шагающего робота на основе конструкции, придуманной великим русским математиком и изобретателем 19 века Пафнутием Чебышёвым, познакомятся с биографией ученого, узнают о такой штуке, как лямбда-механизм и как он используется для преобразования вращательного движения от мотора в поступательное движение машины.
Оборудование: 2 базовых набора Lego Mindstorms Education EV3 или 1 базовый + 1 расширенный набор.
Механизмы: лямбда-механизм Чебышёва.
Описание. Великий русский математик, основоположник петербургской математической школы, академик Петербургской академии наук и 24 академий мира, Пафнутий Львович Чебышёв (1821-1894) оригинальным образом подошел к проблеме преобразования вращательно движения по окружности (например, от парового двигателя) в поступательное движение машины.

Описанный здесь механизм Чебышёв назвал «стопоходящей машиной» и воплотил в дереве и железе. Первый в мире шагающий механизм, изобретенный российским математиком, получил широкую известность на Всемирной выставке в Париже в 1878 году.
Оригинал стопоходящей машины Чебышёва сохранился в Политехническом музее города Москвы, по которому была создана анимированная 3D-модель. Работу механизма можно увидеть на сайте «Математические этюды».
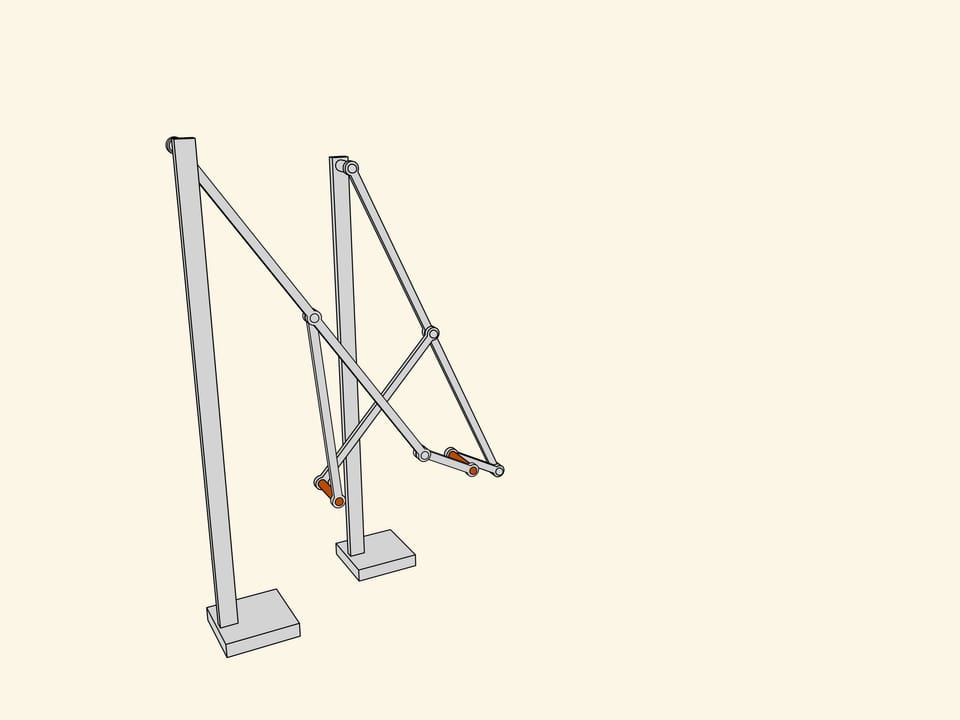
Основная часть стопоходящей машины — «лямбда механизм». Такое название пошло из-за схожести механизма с греческой буквой «лямбда» (λ).
Верхняя точка условного «шатуна», если приводить аналогию кривошипно-шатунным механизмом, описывает траекторию, напоминающую шляпку гриба. При этом нижняя часть траектории является прямой линией. Присоединив к этой балке вертикально стоящую «ногу» со стопой, мы получим основу для шагохода. Ноги стопоходящей машины связываются по диагонали с помощью балок, что обеспечивает их вертикальное положение.
Задачи:
- Ознакомьтесь с биографией русского математика и механика Пафнутия Чебышёва.
- Изучите работу стопоходящей машины на примере анимированной 3D-модели.
- Соберите модель стопоходящей машины по инструкции, используя образовательный конструктор Lego EV3.
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
1. Модели без мотора: механизмы и механические передачи из Lego EV3
Здесь собраны модели, в которых изучается работа механизмов и механических передач.

2. Модели с мотором: программируем сервомоторы и запускаем механизмы
Здесь собраны модели, в которых нужно программировать сервомоторы и собирать сложные механизмы.
3. Модели с датчиками: изучаем работу сенсоров и пишем программы на визуальном языке
Здесь изучаем работу датчиков и программируем модели на внешние реакции.
4. Шагающие роботы
Здесь изучаем работу шагающих механизмов из Lego EV3 и собираем модели, которые перемещаются с помощью конечностей.
5. Игры и соревнования
Здесь собраны модели и регламенты к играм и соревнованиям для Lego Education EV3.
6. Захваты
Здесь собраны разные варианты конструкций захватов для набора Lego EV3.
7. Манипуляторы
Здесь найдете инструкции к моделям для манипуляций с различными предметами.
2014 год: выступление в г. Москва Узялло И.С.
2015 год: выступления в г. Челябинск.
- Андреев С. “Компьютерное моделирование баллистического движения”
- Писарев Р. “Реализация механизмов Чебышева с помощью конструктора Lego Mindstorm NXT”
- Симцов Е. “Моделирование физических процессов с помощью СreateJs”
2016 год: выступления в г. Челябинск.
- Андреев С. “Моделирование физических опытов на Unity”
- Крайнова А. “Психологическое тестирование школьников в Web”
- Писарев Р. “Механизмы Чебышева из Лего”
- Симцов Е. “Приложение для мобильных устройств “Калькулятор систем счисления”
- Ческидов П. “Модель корабля с дистанционным управлением”
2017 год: выступления в г. Челябинск.
- Гончаров М. “Обучающая модель для развития внимания и реакции”. Полезная модель
- Орешин А. “Обучающая игра “Саймон сказал” Полезная модель
- Фрисс Е. “Игра “Преобразование графиков”
- Ческидов М. “Развивающий сайт “Графические диктанты”
- Ческидов П. “Приложение для мобильных устройств “Калькулятор систем счисления”
2018 год: выступления в г. Челябинск.
- Архипова Д. “Программа для решения заданий №16 единого государственного экзамена по информатике”
- Писарев Р. “Поиск кратчайшего расстояния в заданиях ОГЭ и ЕГЭ по информатике”
- Ческидов М. “Модель троичной системы счисления”. Полезная модель
2019 год: выступления в г. Челябинск.
- Андреев С. “Приложение для развития навыков работы с системами счисления”
- Егорова П. “Автоматизация совмещения графической и текстовой информации”
- Сараев Д. “Использование кода, исправляющего ошибку”
Лего-соревнования
2009 год
Участие в районных соревнованиях WRO (Архипова Д., Ковалева Л.)
2010 год
Участие в районных соревнованиях WRO (Просвирнин Д., Кривошеин Н.)
Участие в муниципальных соревнованиях WRO
2011 год
Победа в районных соревнованиях WRO
2012 год
Победа в районных соревнованиях WRO (Просвирнин Д., Сырвачева М.)
3 место в лего-сборах “Я все смогу” (Просвирнин Д.)
2013 год
Участие в FLL (Сырвачева М., Просвирнин Д.)
Участие в Hello Robot (Курочкин И., Печенкин Т.)
Участие в районных соревнованиях WRO
3 место в 5 открытом городском фестивале технического творчества учащихся – кегельринг (Ческидов М.)
2014 год
1 место старшая категория биатлон (Сырвачева М., Архипова Д.)
2 место младшая категория биатлон (Халимов А., Курочкин И.)
3 место старшая категория биатлон (Просвирнин Д.)
2015 год
Гонки роботов (Екатеринбург). Участие. (Сырвачева М., Архипова Д.)
Робофест-Урал. Муниципальный этап.
1 место Hello Robot Start траектория старшая группа (Гончаров И.)
1 место Hello Robot Profi биатлон старшая группа (Архипова Д.)
3 место Hello Robot Start траектория младшая группа (Гладченко А., Патраков Е.)
Робофест Южный Урал региональный этап
1 место Hello Robot Start траектория младшая группа (Гладченко А., Патраков Е.)
2 место Hello Robot Profi биатлон старшая группа (Сырвачева М., Архипова Д.)
WRO Региональный этап
1 место в свободной категории “Лабиринт: туда и обратно” (Гончаров И.)
WRO всероссийский этап (Иннополис)
6 место в свободной категории “Лабиринт: туда и обратно” (Гончаров И., Архипова Д.)
2016 год
Робофест Южный Урал
1 место Hello Robot Profi Сортировщик (Архипова Д., Сырвачева М.)
2 место Hello Robot Profi Траектория (Гончаров И.)
Робофест (финальный этап в г. Москва)
6 место Hello Robot Profi Сортировщик (Архипова Д., Сырвачева М.)
Городской фестиваль технического творчества учащихся
1 место направление робототехническое, “Полоса препятствий” (Гончаров И.)
3 место направление робототехническое, “Полоса препятствий” (Сафонов И.)
WRO Муниципальный этап
2 место в основной старшей категории (Гончаров И., Архипова Д.)
3 место в основной младшей категории (Патраков Е., Гладченко А.)
Участие (Ческидов М., Печенкин Т.)
WRO Региональный этап
1 место в свободной категории “Траектория: карта” (Архипова Д., Сырвачева М.)
Участие (Гончаров И., Ческидов М.)
WRO всероссийский этап (Иннополис)
3 место в свободной категории “Траектория: карта” (Архипова Д., Сырвачева М.)
2017 год
Робофест Южный Урал
3 место Hello Robot Lego Старшая Сортировщик (Гончаров М., Орешин А.)
1 место Робокарусель Старшая (Гончаров И., Архипова Д., Сырвачева М.)
Робофест (финальный этап в г. Москва)
Участие Робокарусель Старшая (Гончаров И., Архипова Д., Сырвачева М.)
Городской фестиваль технического творчества учащихся
6 место кегельринг (Патраков Е.)
6 место полоса препятствий (Ческидов М., Гончаров М.)
4 место захват флага (Печенкин Т., Курочкин И., Гончаров И.)
WRO Городской этап
3 место основная средняя категория (Курочкин И., Печенкин Т.)
WRO Региональный этап
Выход в финалы основная средняя категория (Курочкин И., Печенкин Т.)
1 место СПиРС Локализация: карта (Архипова Д., Сырвачева М.)
2 место СПиРС Локализация: карта (Гончаров И.)
2018 год
2 место Мобильные ИРС Всероссийского этапа WRO (Архипова Д., Сырвачева М.)
2019 год
3 место Профест Южный Урал (Печенкин Т., Ческидов М., Гончаров М., Шутенко Е.)
УчастиеRoboCup Карта (Ческидов М., Шутенко Е.)
Участие WRO Средняя основная (Шутенко Е.)
Участие WRO Старшая основная (Ческидов М., Печенкин Т.)
2 место Мобильные ИРС (Орешков А.)
Добавить комментарий Отменить ответ
Этот сайт использует Akismet для борьбы со спамом. Узнайте, как обрабатываются ваши данные комментариев.
Со времён изобретения Джеймсом Уаттом паровой машины стояла задача построения шарнирного механизма, переводящего движение по окружности в прямолинейное движение.
Великий русский математик Пафнутий Львович Чебышев не смог точно решить изначальную задачу, однако, исследуя её, разработал теорию приближения функций и теорию синтеза механизмов. Используя последнюю, он подобрал размеры лямбда-механизма так, чтобы… Но об этом чуть позже.
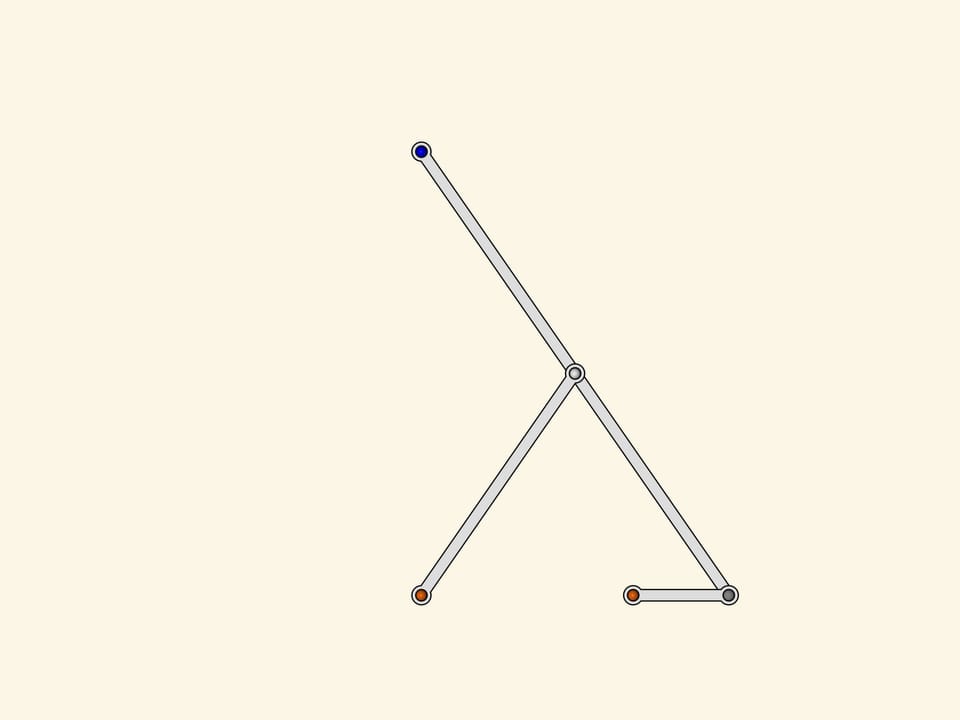
Два неподвижных красных шарнира, три звена имеют одинаковую длину. Из-за своего вида, похожего на греческую букву «лямбда», этот механизм и получил своё название. Незакреплённый серый шарнир маленького ведущего звена вращается по окружности, при этом ведомый синий шарнир описывает траекторию, похожую на профиль шляпки белого гриба.
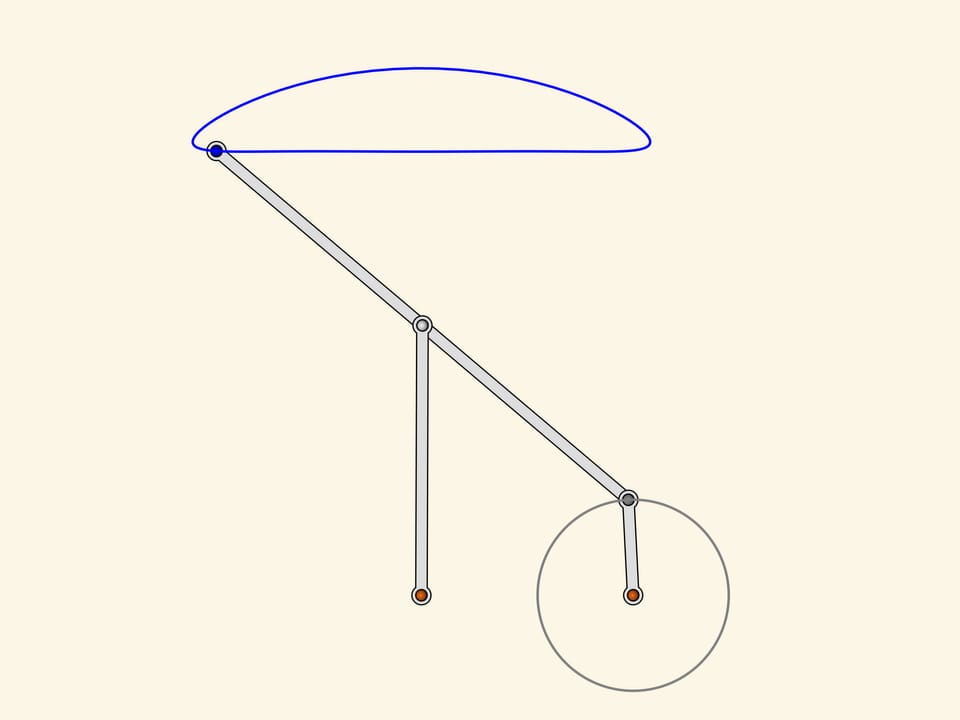
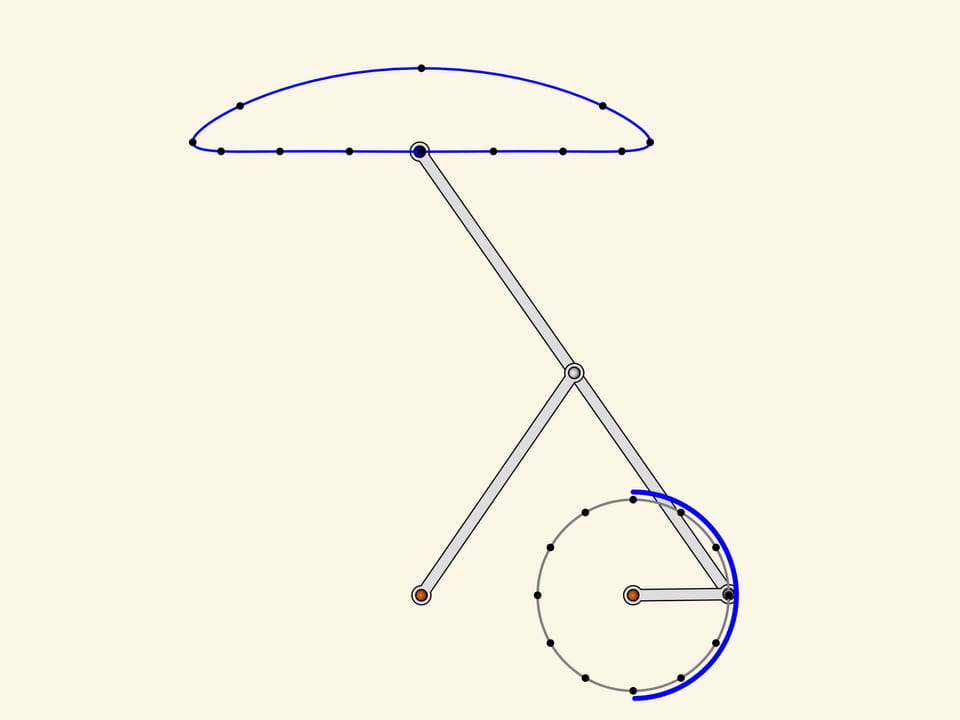
Расставим на окружности, по которой равномерно вращается ведущий шарнир, метки через равные промежутки времени и соответствующие им метки на траектории свободного шарнира.
Нижнему краю «шляпки» соответствует ровно половина времени движения ведущего звена по окружности. При этом нижняя часть синей траектории очень мало отличается от движения строго по прямой (отклонение от прямой на этом участке составляет доли процента от длины короткого ведущего звена).
На что же ещё, кроме шляпки гриба, похожа синяя траектория? Пафнутий Львович увидел сходство с траекторией движения копыта лошади!
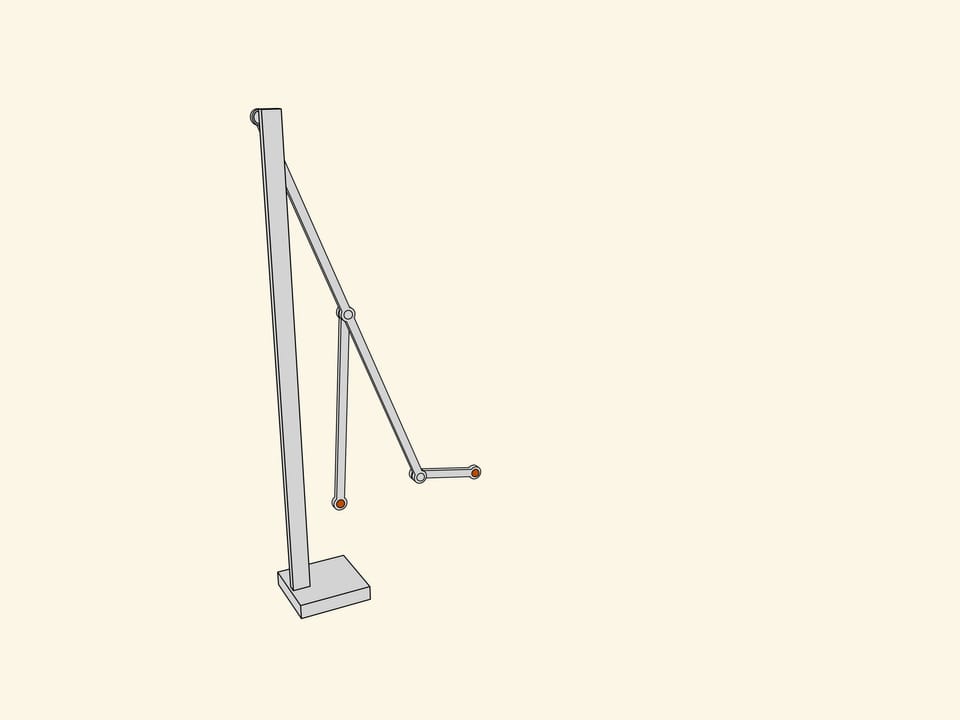
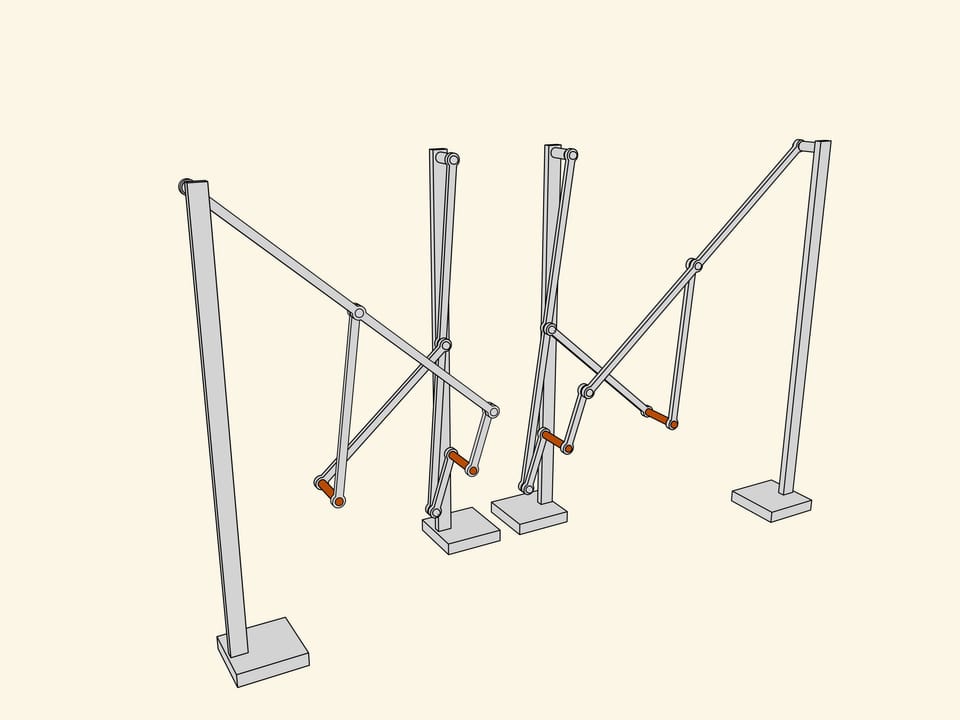
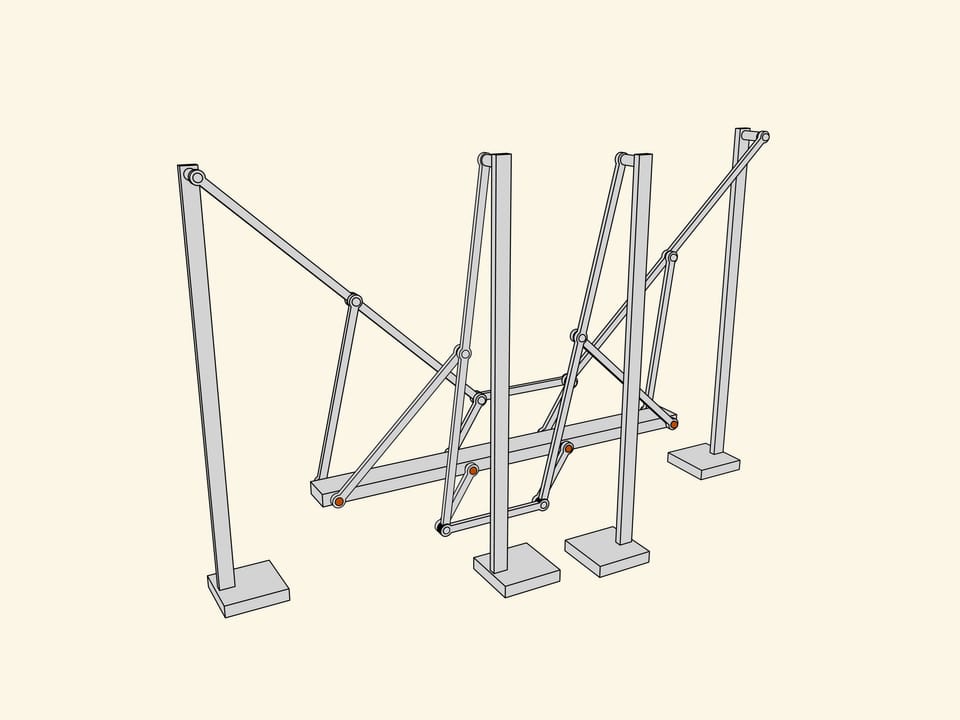
Приделаем к лямбда-механизму ногу со «стопой». Прикрепим к тем же неподвижным осям в противоположной фазе ещё одну такую же. Для устойчивости добавим зеркальную копию уже построенной двуногой части механизма. Дополнительными звеньями согласовываются их фазы вращения, а общей платформой соединяются оси механизма. Мы получили, как говорят в механике, кинематическую схему первого в мире шагающего механизма.
Пафнутий Львович Чебышев, будучи профессором Санкт-Петербургского университета, бóльшую часть своего жалования тратил на изготовление придуманных механизмов. Он воплотил описанный механизм «в дереве и железе» и назвал его «Стопоходящая машина». Этот первый в мире шагающий механизм, изобретённый российским математиком, получил всеобщее одобрение на Всемирной выставке в Париже 1878 года.
Читайте также: