
Проект по робототехнике lego ev3
Обновлено: 02.05.2024
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
« Использование датчика цвета Lego Mindstorms EV 3 для решения задач компьютерного зрения »
Даже простой ученический набор Lego Mindstorms EV 3 позволяет сконструировать и запрограммировать робота, который может «видеть» объекты. Точнее, робот может измерить расстояние до ближайшего объекта по ходу движения. Этого достаточно, чтобы заставить робота «искать» себе подобных (например, в соревнованиях «Робосуммо»), или следовать за объектом на заданном расстоянии и т.п.
Но этого «умения» катастрофически недостаточно для идентификации объекта! Как заставить робота распознать объекты перед ним? Как отличить кубик от шарика? Как понять какое число написано перед ним? Ведь в наборе Lego Mindstorms EV 3 присутствуют только датчик цвета (позволяющий оценить яркость освещения, яркость отраженного света или определять один из семи предустановленных цветов) и ультразвуковой датчик (позволяет измерять расстояние до объекта перед датчиком).
Мы же в своей работе, на основе только этих датчиков, попытались создать робота, который «видит» арифметическое выражение, составленное из кубиков, способен различить цифры и знаки арифметических операций и может проверить правильность ответа в арифметическом приложении.
Цель работы: создание робота из набора Lego Mindstorms EV 3, способного распознавать арифметические выражения на игральных кубиках и проверять их правильность
Сегодня уже практически в каждой школе преподается курс «Робототехники» на основе наборов Lego Mindstorms EV 3. Наши школьные роботы совсем как дети – они развиваются вместе с нами: первое, что мы учимся с ними делать – это передвигаться в пространстве («ползать» и «ходить»): сначала хаотично, затем осмысленно (езда по черной линии, распознавание препятствий на пути следования). Затем возникают все более сложные задачи, которые требуют уже умения не только управляться с моторами, но и задействовать ряд датчиков из набора. Также и с детьми: с взрослением приходит понимание происходящих вокруг процессов и понимание того, как можно управлять и взаимодействовать с окружающим миром.
Еще с детства, всем хорошо известна детская игра кубики, когда на каждой грани кубика нарисована одна из букв русского алфавита, и поворачивая и комбинируя различные грани можно составлять различные слова. Психологи рекомендуют начинать заниматься с такими кубиками малышам с трёх лет. Такие кубики как правило достаточно красочные и кроме самих букв содержат иллюстрации. После того, как буквы изучены, любой малыш учится считать, приходит первое знакомство с цифрами и простейшими арифметическими операциями.
Наши роботы (вместе с «робототехниками») уже «доросли» до того возраста, когда пора учиться считать и читать. И здесь на первый план выходят задачи компьютерного зрения. Компьютерное зрение относится к теории и технологии создания искусственных систем, которые получают информацию из изображений. Видеоданные могут быть представлены множеством форм, таких как видеопоследовательность, изображения с различных камер или трехмерными данными.
Вопросы обработки видеоданных с помощью наборов Lego Mindstorms EV 3 являются скорее прикладными, потому что в набор не входит видеокамера и в программном обеспечении отсутствуют команды, способные работать с видеоданными. Хотя «зачатки» таких команд имеются: с помощью стандартного программного обеспечения возможно выводить информацию (и не только в текстовом виде) на монохромный дисплей микрокомпьютера Lego Mindstorms EV 3 с разрешением 178 на 128 пикселей. Но это скорее умение «писать», чем «читать».
Справедливости ради, стоит отметить, что с конца 2015 года за отдельную плату предлагается видеокамера Pixy LEGO (CMUcam5). Она подключается напрямую к контроллеру Lego Mindstorms NXT или EV3 с помощью прилагаемого кабеля и интегрируется в программную среду Lego. Камера позволяет снимать с разрешением 640*400 пикселей и частотой 50 кадров в секунду. Pixy выполняет обработку изображения на своем борту, освобождая мощности микроконтроллера для других задач. Для обнаружения объектов Pixy использует алгоритм фильтрации, основанный на цветах. Большинство из нас знакомы с цветовой моделью RGB (красный, зеленый и синий), Pixy вычисляет цвет (оттенок) и насыщенность каждого пикселя изображения и использует в качестве параметров первичной фильтрации. Pixy помнит до 7 подписей разных цветов, если вам нужно больше, вы можете использовать коды цвета.
Но цена самого дешевого варианта такой камеры (посылкой из Китая) начинается от 5000 рублей (а это почти 25% всего набора) – дорогое удовольствие.
Ввиду отсутствия средств на закупку камер, мы решили обучать «чтению» наших роботов с самых основ – а именно, научить их сначала определять цифры. Но даже эта тривиальная задача оказывается достаточно сложной при детальном рассмотрении. Посудите сами: в наборе Lego Mindstorms EV 3 из датчиков, хоть как-то способных помочь нам в решении нашей задачи, присутствуют только датчик цвета (позволяющий оценить яркость освещения, яркость отраженного света или определять один из семи предустановленных цветов) и ультразвуковой датчик (позволяет измерять расстояние до объекта перед датчиком).
Проанализировав литературу по кодированию и передачи информации было найдено гениальное в своей простоте решение: если в наборе есть датчик, который позволяет распознать цвета, необходимо каждую цифру или букву представить цветовым кодом. Таким образом, наш робот Lego Mindstorms EV 3 будет способен воспринимать гораздо больший объем информации об окружающем мире.
Итак, задача: создать робота из стандартного набора Lego Mindstorms EV 3, способного распознавать арифметические выражения на игральных кубиках и проверять правильность этих арифметических выражений.
Для набора, были построены 6-гранные игральные кубики, которые можно встретить в любом магазине игрушек: на каждой грани кубика расположена цифра (от нуля до десяти) или знак простейшей арифметической операции (сложение, вычитание, деление).
Для упрощения длины программного кода были наложены искусственные ограничения: работа только с двузначными положительными целыми числами (от 0 до 99 включительно), только целочисленное деление. Последнее ограничение введено из-за особенностей работы с различными типами данных. Кроме этого, был введен дополнительный символ «точка» для определения конца арифметического выражения.
Все цифры и арифметические выражения на кубиках были закодированы равномерным двоичным кодом с длинною равной четырём. Как всем известно из курса информатики, количество различных значений для равномерного кода такой длины составляет 2 4 =16. Этого количества нам будет достаточно для кодирования 10 цифр, 5 знаков арифметических операций (сложение, вычитание, равенство, умножение, деление (данная операция будет реализована в перспективе)) и одного специального символа окончания строки (точка).
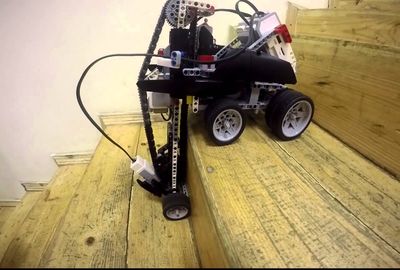
Индивидуальный исследовательский проект по робототехнике "Ступенькоход" содержит доступное описание проведенной учащимся работы по созданию модели робота–ступенькохода, который служит для перемещения людей с ОВЗ по лестничным маршам и пролетам.
Подробнее о проекте:
Творческая работа учащегося 11 класса о создании робота-помощника для колясочников подымает важный социальный вопрос о достижении независимости и самостоятельности людей с ОВЗ в сфере самообслуживания. По мнению автора проекта, для этого необходимо приспособить жилища и общественные здания к особенностям и специфическим потребностям инвалидов, то есть спроектировать устройство для беспрепятственного доступа инвалидов в любое помещение.
Готовая творческая работа по робототехнике на тему "Ступенькоход" демонстрирует этапы работы автора над сборкой робота-ступенькохода, используя конструктор Lego Mindstorms EV3. Изучив программное обеспечение данной версии конструктора, автор собрал запланированную модель и запрограммировал ее на передвижение по прямой и по лестничным маршам.
Оглавление
Введение
1. Изготовление робота-ступенькохода.
Выводы и практические рекомендации
Заключение
Список литературы
Приложения
Введение
В настоящие время перед современным обществом стоит непростая задача кардинального изменения отношения к людям с ограниченными возможностями здоровья путем создания им условий для самореализации, равных возможностей; разработки и внедрения различных способов и мер, позволяющих им полноценно осваивать социальный опыт, существующую систему общественных отношений.
Для этого необходимо создать систему эффективной социальной поддержки, включающей социальные, медицинские, педагогические, психологические разделы их реабилитации, позволяющих равноправно инвалидам входить в общество здоровых людей. Статус инвалида характеризуется социальной изоляцией, ограничением практически всех видов его жизнедеятельности. Преодоление социально-психологической дезадаптации инвалидов предполагает, прежде всего, изменение отношения общества к этой категории.
Актуальность. В настоящее время актуальной является проблема организации социальной поддержки людей с ограниченными возможностями. Участие в различных видах досуговой деятельности является необходимой областью социализации, самоутверждения и самореализации инвалидов, но ограничено, в связи с недостаточным уровнем развитости и доступности.
Часть инвалидов ограниченны в передвижении (маломобильны) и их миром являются стены квартиры. Много мероприятий, проводимых в районе на сегодняшний день, не предусматривают участия в них данной социальной группы.
Цель проекта: создать модель робот – ступенькоход, который служит для перемещения людей с ОВЗ по лестничным маршам и пролетам.
- сконструировать модель робота, выполняющего функции подъемника;
- создать программу для робота, которая позволила бы ему двигаться по лестничным пролетам, перемещая людей с ОВЗ;
- Обеспечить доступ к жилому зданию и возможность перемещения внутри. Обеспечить безопасные лестницы для всех пользователей, в том числе и для людей пожилого возраста, детей, людей со сниженным зрением и проблемами моторно-двигательной сферы.
Субъект проекта: помощь людям с ограниченными возможностями при перемещении по лестничным пролетам в заданиях, не оборудованных лифтом.
Объект проекта: «Робот – ступенькоход».
Гипотеза: робототехника позволяет создавать роботов-помощников для социализации людей с ОВЗ.
- в ходе выполнения проекта будут созданы:
- модель «робот-ступенькоход»;
- программа, которая обеспечит работу робота;
- презентация проекта.
Методы реализации проекта:
- Объяснительно-иллюстративный – предъявление информации различными способами (объяснение, рассказ, беседа, инструктаж, демонстрация, работа с литературой и др);
- Эвристический – метод творческой деятельности (создание творческой модели);
- Проблемный – постановка проблемы и самостоятельный поиск её решения;
- Программированный – набор операций, которые необходимо выполнить в ходе выполнения практических работ (компьютерный практикум);
- Частично-поисковый – решение проблемных задач с помощью педагога;
- Поисковый – самостоятельное решение проблем.
Материальные ресурсы: конструктор с программным обеспечением Lego Mindstorms EV 3 – 1 основной набор+ 1 набор дополнительный.
Создание робота-ступенькохода
Для достижения независимости и самостоятельности людей с ОВЗ в сфере самообслуживания необходимо приспособление жилищ и общественных зданий к особенностям и специфическим потребностям инвалидов, устройство для беспрепятственного доступа инвалидов в любое помещение.
Это пандусы при входе в здание, определенные типы, размеры и конструкции дверей и тамбуров, лифты и подъемники для инвалидов на кресло-колясках, дополнительные ограждения лестничных проемов, приспособления, облегчающее инвалидам самообслуживание в раздевальных, душевых и уборных помещениях. Данные мероприятия играют немаловажную роль, но здесь встает вопрос о том, как быть людям маломобильной группы внутри самого здания, если ему необходимо подняться на 2 или выше этажи и попасть к специалистам.
Чтобы ответить на этот вопрос, обратился в центр социального развития, где получил ответ:
- «Все социально-значимые учреждения оборудованы пандусами и кнопкой «Вызов специалиста».
Но подтвердилась проблема, которая возникает внутри здания-отсутствие лифта в социально - значимых учреждениях.
В помощь, людям, ограниченным в передвижении, мы решили изобрести робот-ступенькоход.
На подготовительном этапе инициативная группа изучила материал в Интернет - сети, о том, какие существуют приспособления для передвижения людей инвалидов. Выяснили, что существуют разные виды ступенькоходов.
Занимаясь в творческом объединении «Рободем» с конструктором Lego Mindstorms EV3, изучил программное обеспечение к данной версии конструктора. Программа состоит из различных групп программных блоков. Блоки выстраиваются последовательно, при необходимости заключаются в цикл. Программа загружается через USB шнур.
Из деталей конструктора собрал ходовую часть робота, установил аккумулятор, большие и средние моторы, датчик касания, гироскопический датчик, отвечающий за равновесие робота. Большой мотор осуществляет движение робота, что позволяет данной модели передвигаться не только по лестничным маршам, но и по ровной поверхности. Средний мотор отвечает за гусеничный ход, позволяющий перемещать заднюю часть робота в нужном направлении.
На этапе конструирования столкнулся с проблемой выбора диаметра колес для передвижения по ступеням (ведущие колеса передней части робота должны быть более мощными для устойчивого положения во время передвижения по ступенькам).
На следующем этапе (программировании) разработал программу, приводящую ступенькоход в движение с учетом встроенных датчиков.
Выводы и практические рекомендации
Мы задались вопросом:
- доволен ли результатами своей работы?
- нравится ли получившееся изделие?
- получит ли оно дальнейшее применение?
По результатам тестирования модели остался доволен выполненной работой, но пришел к выводу, что необходимо разработать механическую систему блокировки движения устройства на краю ступенек. Устройство решает серьезную задачу – обеспечивает безопасный и комфортный спуск-подъем по лестнице инвалида-колясочника там, где отсутствуют другие возможности, такие как лифт, пандус или стационарный подъемник.
Цель проекта достигнута, задачи в ходе работы выполнены полностью
Заключение
Мне кажется, что полученные навыки по робототехнике обязательно пригодятся в жизни. Можно не только изобретать роботов из готовых наборов, но и использовать подручные материалы для создания действующих моделей.
Надеюсь, что модель заинтересует инженеров, которые смогут реализовать мою идею в жизнь в промышленных масштабах. Такой робот станет незаменимым помощником людям с ограниченными возможностями здоровья, ведь качество жизни инвалидов показывает уровень развития и осознанности общества в целом. Поэтому создание безбарьерной среды заявлено как одно из приоритетных направлений в государственной политике.
И в сознании все большего количества людей появляется понимание по отношению к людям «с расширенными потребностями».


Роман Голятин

Первое знакомство c робототехникой EV3: описание наборов LEGO MINDSTORMS EV3 HOME (№31313), LEGO MINDSTORMS EV3 EDUCATION (№45544) и доп (ресурсного) набора к 45544-LEGO MINDSTORMS EV3 EDUCATION (45560)

Мирас Золотов ![]()
запись закреплена

~
--СУМО (ШАГАЮЩИЙ)--
--Программа со сборкой 500 ₽---
~
~
--Гонка По линий--
--Программа 250 ₽ —
--Сборка 100₽--
~
Другие Программы только по заказу

Майкл Майколов запись закреплена


Сергей Щеколдин запись закреплена
Добрый день. Кто-нибудь сталкивался с проблемой в EV3 Classroom, иногда выскакивает ошибка "невозможно скомпилировать код" и не загрузить программу. Как это вылечить? Спасибо.

Валерий Кудрявцев запись закреплена
Приглашаем всех в эту пятницу 25.12.2020 (с 15.30 до 17.00) на вебинар Академии BiTronics "Обработка сигнала ЭМГ и проект "Миопушка" на базе лаборатории BiTronics Neurolab для LEGO MINDSTORMS EV3".
На этом вебинаре мы продолжим работу с лабораторией BiTronics Neurolab для LEGO MINDSTORMS EV3. В этот раз темой будет обработка сигналов ЭМГ в ПО LEGO MINDSTORMS EV3.
Показать полностью.
Прямо на вебинаре мы напишем программу для получения обработанного значения сигнала электромиограммы - амплитуды силы (подробно остановимся на блоках палитры "Операции с данными" в ПО LEGO MINDSTORMS EV3). Используем обработанный сигнал для создания проекта "Миопушка" (из сборника методических рекомендаций по использованию модулей BiTronics Neurolab).


Романа Швайковского запись закреплена

Игорь Лунин запись закреплена
Друзья, подскажите ПОЖАЛУЙСТА у кого есть книга "Курс программирования робота ev3 в среде lego mindstorms ev3 л.ю овсяницкая"? Буду очень благодарен! Её везде заблокировали, как я понял. (


Владислав Круглый запись закреплена

DELETED запись закреплена
Валерий Кудрявцев запись закреплена
https://www.youtube.com/watch?v=jjJH09Uiw4Y&t=4366s
Запись вебинара "Программирование роботов Lego Mindstorms EV3 на языке Small Basic, часть 2".

Роботы LEGO EV3-от А до Я запись закреплена


Руслан Исаев

Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.

Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.
Чтобы программировать робота LEGO Mindstorms EV3 на языке Python мало знать только этот язык. Необходимо ещё иметь представление о библиотеке ev3dev.ev3, для работы с датчиками и моторами. А также не помешало бы иметь под рукой полноценную среду разработки с подсказками, подсветкой синтаксиса и отладчиком. В статье я опишу, как настроить EV3 и компьютер для комфортной разработки вашего проекта на Python.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.

Чтобы программировать робота LEGO Mindstorms EV3 на любимом языке программирования, использовать огромное количество продвинутых библиотек и получить доступ к дополнительному подключаемому оборудованию, такому как клавиатура, джойстики, мышки и камеры, вам просто необходимо использовать полноценную операционную систему. Здесь на помощь придёт ev3dev – операционная система, базирующаяся на Debian Linux. Я предлагаю вам познакомиться с процессом установки и настройки этой операционной системы.

С помощью дополнительных блоков можно существенно расширить возможности своей программы, созданной в среде разработке LEGO Mindstorms EV3. Читая эту статью вы изучите анатомию блока и научитесь создавать свои собственные блоки.
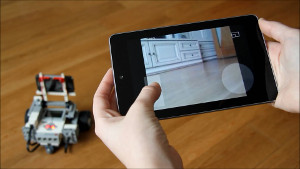
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.
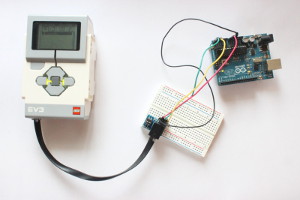
Иногда, при создании роботов возникает необходимость использования нескольких различных платформ в одном проекте, например, EV3 и Arduino. Так вы сможете использовать сильные стороны каждой из платформ и распараллелить выполняемые задачи. Я предлагаю вам ознакомиться с переводом статьи, в которой описано, как соединить EV3 и Arduino и как использовать Arduino совместно с EV3.

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.

Open Roberta Lab или открытая лаборатория Роберты, робо-леди, которую вы видите на картинке – это облачная среда программирования роботов Lego Mindstorms EV3 очень похожая на Scratch 2, но не требующая установки на компьютер. Ваши готовые программы вы можете протестировать здесь же на симуляторе. Для программирования и использования симулятора вам достаточно иметь браузер и доступ в интернет.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.

Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.
Как известно, виртуальная Java-машина leJOS, которую мы можем использовать для программирования роботизированного конструктора LEGO Mindstorms EV3, совместима не только с официально поддерживаемым адаптером NETGEAR N150, но и с рядом других адаптеров. Здесь я предлагаю вам перевод статьи с официального блога leJOS, в которой приводится сравнение различных поддерживаемых WiFi-адаптеров.

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Эта статья будет интересна тем, кто хочет сделать программу для дистанционного управления роботом EV3 со стандартной заводской прошивкой через Bluetooth, WiFi или USB и не важно, с какого устройства или операционной системы. Здесь мы рассмотрим протокол взаимодействия между модулем EV3 и вашей программой.

Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

С помощью чего только не программируются роботы LEGO Mindstorms EV3. Поддерживается большое количество языков программирования на любой вкус. Но сегодня я хочу рассказать вам, о самом, на мой взгляд, удобном и богатом, в плане возможностей, способе программирования роботов LEGO Mindstorms EV3. Удобный, потому что разрабатывать можно в среде разработки Eclipse на языке Java, а богатый, потому, что виртуальная машина Java для EV3, которая называется leJOS, поддерживает не только стандартные возможности EV3, но даёт и гораздо больше.
Если вам нравится графическая среда программирования Scratch 2.0, то вам необязательно отказываться от неё для программирования роботов Lego Mindstorms EV3. Достаточно лишь установить и настроить нужное программное обеспечение, о чём и будет написано в этой статье.

Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.

Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.
Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.
Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.
Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.
Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.
Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».

В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.
Читайте также: