
Robotc for lego mindstorms
Обновлено: 28.04.2024
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Latest commit
Git stats
Files
Failed to load latest commit information.
README.md
Welcome to the ROBOTC Driver Suite Github repository.
The Driver Suite is a collection of drivers for LEGO and 3rd party sensors for both NXT and EV3. These drivers offer access to additional functionality, which is left unexposed if you use the standard built-in ROBOTC drivers.
This repository contains a regularly updated work in progress of the migration of (almost) all drivers a new, more easy to use and uniform API.
How to install it?
If you're keen to try out these bleeding edge drivers, navigate to [this page] howtopage and follow the instructions. Simply substitute the repository in that text with this current one.
You can simply [download as zip] masterzip and expand on your system, somewhere.
If you're a more advanced user, I would advise you to use something like [Git] gitsite or the more user friendly UI based [SourceTree] [sourcetreesite]
So what is so special about this new API? It's a complete rethink of how the drivers handle sensor data. All data (or as much as possible), is contained within a sensor specific struct. For example, the struct that contains I2C data looks as follows:
Global variables have been eliminated as much as possible, making the drivers less prone to weird behavioural issues, if multitasking is used.
A sensor specific struct will look more like this. This is the one for the HiTechnic Angle Sensor:
As you can see, the sensor's struct contains an I2CData struct as well, to keep all the data specific to that sensor in one place.
These functions below may not pertain to all drivers, but if the sensor offers this functionality, it will be accessible through that specific function. It relies heavily on ROBOTC's function overloading to allow multiple functions with the same name to exist, but taking different arguments.
If you're interested in seeing an actual example of this, take a look at the [HiTechnic Angle Sensor example program] htangleexample.
If you want to contribute, simply [clone] clonehelp this repo, start tinkering with the files and submit a pull request. I encourage you to read through the examples that I have created and migrate some of the others. You can see the current status of the drivers in the [Excel sheet] status_sheet. Modifications to this file will not be accepted. If you want to start working on a driver, simply submit it as an [issue] issuelink. That will prevent multiple people working on the same drivers. There is not much point in duplicating effort.
Please note: I do reserve the right to modify submitted code as I see fit, to keep it aligned with the rest of the Suite.
A word of advice: keep your commits small, this will make merging MUCH easier for me. Contributors will be mentioned in a THANKYOU file, of course!
Текстовый язык программирования, основанный на С, обладающий удобной средой разработки и предназначенный для работы с популярными робототехническими комплектами.
LEGO Mindstorms (NXT и RCX), Cortex, Innovation First VEX и некоторые другие среды для программирования роботов имеют свои собственные уникальные языки, существенно отличающиеся друг от друга. Все желающие перейти с одной платформы на другую вынуждены тратить время и силы на их изучение. Для решения этой задачи был создан кросс-платформенный язык программирования RobotC, отличающийся от стандартного C увеличенным набором команд по работе с устройствами контроллера.
RobotC предназначен как для на новичков, так и для подготовленных программистов и имеет два режима работы – базовый и расширенный. В соответствии с этим среда программирования поддерживает два языка: собственно сам RobotC, являющийся особым диалектом C, и «естественный язык» Natural Language, позиционирующийся как переходный от графических форм (наподобие NXT-G) к текстовым блокам и использующий вместо низкоуровневых команд опроса датчиков и управления моторами процедуры с заранее определенными для робота действиями. Кроме того, разработчики RobotC обещают в скором времени поддержку еще одного графического языка, напоминающего Scratch, в котором создание программ будет осуществляться переносом графических блоков и их соединением в пазл. Каждый блок будет иметь ряд конфигурируемых параметров, влияющих на поведение роботов.
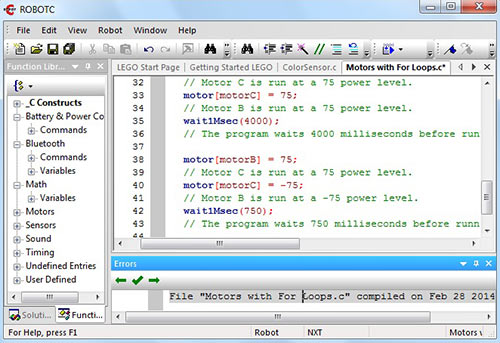
ПО RobotC позволяет разрабатывать приложения для работы со следующими платформами: TETRIX, NXT, Cortex, RCX, PIC, VEX PIC, Arduino Diecimila, Duemilanove, Mega 2560, Mega 1280, Uno. Программное обеспечение имеет схожую с Visual Studio среду и включает в себя мощный интерактивный отладчик, способный функционировать в режиме реального времени, тем самым существенно сокращая время отладки кода. Данная среда обладает развитыми возможностями для работы с математическими выражениями, с помощью которых можно составлять весьма эффективные и сложные программы. В RobotC существует опция предоставления данных с датчиков в «сыром» виде в формате RAW. Среда может поддерживать связь с устройствами посредством инфракрасного канала или Wi-Fi.
Среда программирования RobotC является платной. Полнофункциональную 30-дневную демоверсию программного обеспечения для интересующей платформы можно найти на странице загрузки. По истечению этого срока необходимо приобрести лицензию. Среда программирования содержит все необходимые руководства, примеры и файлы справки.
Пользовательский интерфейс RobotC представлен на английском языке, русификатора нет.
Распространение программы: платная. Есть полнофункциональная trial-версия 30 дней
Программирование EV3 происходит сразу после того как вы создали своего робота. Нужно научить робота EV3 выполнять различные команды.

лего программирование
Запрограммировать робота с микрокомпьютером EV3 можно несколькими различными способами:
- Первый и самый простой способ – это при помощи интерфейса микроконтроллера EV3;
- Среда программирования EV3 позволяет при помощи визуального программирования создавать достаточно сложные программы:
- При помощи других языков программирования.
Программирование на микроконтроллере EV3
Самым простым является программирование при помощи самого интерфейса микрокомпьютера EV3.
Микропроцессор EV3 поставляется с уже установленным на нем программным обеспечением.
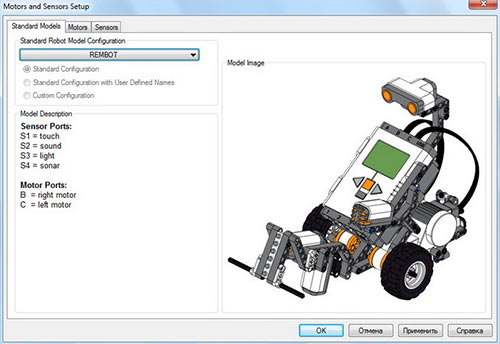
После включения модуля EV3 можно увидеть экран с четырьмя основными закладками.
Для программирования модуля требуется перейти в третью закладку при помощи кнопок управления. Затем открыть окно приложения Brick Program. Сразу отображаются два блока – это блок «Начало» и блок «Цикл».

программирование блока лего
В этом окне можно создавать простые программы при помощи двух типов блоков. Всего в палитре существует одиннадцать блоков ожидания и шесть блоков действия.
Среда программирования EV3

редактор EV3
Также в ПО существуют задания по программированию, которые позволяют быстро научиться программировать роботов EV3. Программное обеспечение является пиктографическим. Оно обеспечивает простое и интуитивно понятное визуальное программирование.
Существенным недостатком является то, что при написании сложных и разветвленных программ, это ПО достаточно сильно грузит систему. При этом слабые компьютеры сильно тормозят. Поэтому желательно иметь компьютеры с хорошими характеристиками. На сайте опубликованы минимально допустимые характеристики компьютеров.

требования к оборудованию
EV3 является целой платформой, которую можно использовать в игровых и образовательных целях. При помощи платформы Lego Mindstorms EV3 можно обучать основам робототехники, программирования, изучать различные алгоритмы. При этом не нужно иметь знаний схемотехники и различных протоколов.
Программирование EV3 Basic

Small Basic
Основными достоинствами EV3 Basic являются:
- Простота установки;
- EV3 Basic является свободным программным обеспечением
- Microsoft Small Basic специально разрабатывался для того, чтобы обучать программированию;
- Не нужно перепрошивать микрокомпьютер EV3;
- Поддерживает русский язык;
- Имеет встроенную справку;
- Имеет понятный интерфейс;
- Есть множество примеров;
- Поддерживает все возможности среды программирования Lego EV3.
Программирование EV3 на RobotC
Среда программирования RobotC специально разработана для образовательной робототехники. Этот язык может использоваться и новичками, и опытными программистами и является кросс-платформенным. Есть базовый и расширенный режим программирования.

RobotC
В среде программирования присутствует C-подобный язык и язык RobotC. Язык RobotC – это переходный язык от визуального программирования к текстовым блокам. Для использования RobotC требуется перепрошивка микроконтроллера EV3. Использовать RobotC можно со многими робототехническими платформами. Это такие платформы как :
- VEX IQ;
- VEX CORTEX (EDR);
- VEX PIC (Legacy Support);
- LEGO MINDSTORMS EV3;
- LEGO MINDSTORMS NXT;
- TETRIX;
- RCX (поддержка прежних версий);
- UNO Arduino / MEGA 1280, MEGA 2560;
Среда программирования RobotC похожа на среду программирования Visual Studio и имеет интерфейс на английском языке. RobotC является платным с десятидневным бесплатным периодом.
После окончания бесплатного периода нужно приобретать лицензию. Стоимость годовой лицензии:
- На один компьютер 49 долларов;
- На шесть рабочих мест 149 долларов;
- На тридцать рабочих мест 299 долларов.
- Кроме этого предлагаются бессрочные лицензии.
Операционная система для RobotC должна быть из семейства Microsoft Windows. При помощи среды программирования RobotC можно создавать эффективные программы с использованием сложных математических выражений.
Программирование EV3 на Python
Одним из наиболее популярных языков программирования в мире является Python. Он имеет небольшое синтаксическое ядро и объемную стандартную библиотеку функций. В операционной системе Linuх язык программирования Python установлен. При желании можно установить нужный вам текстовый редактор.
На микрокомпьютере EV3 установлена операционная система Linux. Для того, чтобы программировать EV3 на Python нужно установить Linux ev3dev на модуль EV3.
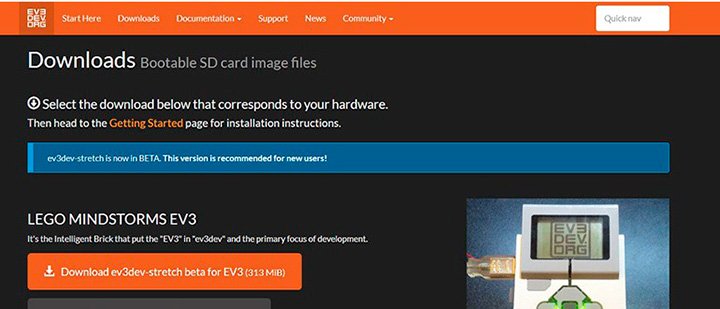
ev3dev
Затем нужно установить образ на карту памяти microCD. Желательно, чтобы класс карты был не менее десяти. Объем карты памяти от двух до тридцати двух гигабайт. Можно также использовать карту памяти microSDHC.
После этого карту с образом можно вставлять в микрокомпьютер EV3 и включать его. Подсветка кнопок будет мигать оранжевым цветом. Это означает что происходит загрузка операционной системы. После загрузки на экране блока EV3 будет видно меню программы.
Затем нужно настроить соединение с компьютером и можно приступать к работе. Настройки соединения с компьютером нужно описывать отдельно так как они достаточно сложные. Для написания программ нужен еще редактор кода.
В качестве одного из вариантов можно установить редактор кода PyCharm Edu. Есть бесплатная версия с наличием подсказок, проверкой кода и подсвечиванием синтаксиса. Созданный в программе файл можно передать в блок EV3 при помощи программы PuTTY. Эта программа помогает установить SSH соединение операционной системы Windows с микроконтроллером EV3.

PuTTY
Программирование EV3 при помощи Scratch
Scratch является графической средой программирования. Программировать EV3 при помощи Scratch можно если установить нужное программное обеспечение и настроить его. Программное обеспечение можно установить на любые операционные системы. Для примера выберем операционную систему Windows.

Scratch_2_0
Как и в случае с программированием на Python, потребуется карта памяти с такими же параметрами. Карту памяти нужно отформатировать в файловой системе FAT32. На компьютер надо установить виртуальную Java-машину под названием leJOS.
Затем устанавливаем виртуальную машину на компьютер со всеми компонентами.
После этого устанавливаем образ на карту памяти. В дальнейшем при включении микрокомпьютера EV3 с картой памяти будет загружаться leJOS EV3. Без карты памяти будет происходить загрузка стандартного программного обеспечения Lego EV3.
Также на компьютере должна быть установлена свежая версия Adobe AIR. Затем можно установить редактор Scratch.
Установка редактора не занимает много времени.
Следующим шагом является установка ev3-scratch-helper-app. Это приложение служит для связи редактора Scratch и микроконтроллера EV3. Также в редакторе можно в настойках установить русский язык и нужно добавить блоки EV3 в редактор Scratch. После добавления блоков можно приступать к написанию программ.
В статье приведены не все возможные варианты программирования EV3, а только наиболее простые и не требующие каких-либо специальных знаний. Каждый вариант имеет свои достоинства и недостатки. Остается только выбрать что больше всего подходит в каждом конкретном случае.
Статья опубликована в рамках: Международной научно-практической интернет-конференции «Актуальные проблемы методики обучения информатике и математике в современной школе» (Россия, г.Москва, МПГУ, 22 — 26 апреля 2019г.)
ROBOTC — КРОСС-РОБОТОТЕХНИЧЕСКИЙ ЯЗЫК ПРОГРАММИРОВАНИЯ
Векслер Виталий Абрамович,
кандидат педагогических наук, доцент
Саратовский национальный исследовательский государственный университет
имени Н. Г. Чернышевского
Аннотация: Робототехника стала универсальным педагогическим инструментов, она легко вошла в дополнительное образование, во внеурочную школьную деятельность, в преподавание предметов школьной программы. Одним из базовых языков программирования для робототехнических конструкций стал RobotC. В статье описываются особенности и преимущества данного языка программирования. Приводятся примеры решения практических задач.
Ключевые слова: робототехника, программирование, обучение, RobotC, Vex IQ
Сегодня одним из ведущих языков программирования устройств для образовательной робототехники и соревнований стал RobotC, кросс-робототехнический язык программирования, используемый в популярных образовательных системах. RobotC созданный на основе языка Си, поддерживает следующие робототехнические конструкции: VEX IQ, VEX CORTEX (EDR), VEX PIC, LEGO MINDSTORMS EV3, LEGO MINDSTORMS NXT, TETRIX, RCX (Legacy Support) Arduino UNO / MEGA 1280.
К преимуществам языка можем отнести: использует стандартный язык Cи-программирования; cовременный Windows GUI со стандартным визуальным интерфейсом; единственное решение с полностью интегрированным программным отладчиком, позволяющее пользователям шаг за шагом выполнять программы и анализировать все переменные; дополнительные инструменты отладки позволяют пользователю видеть в режиме реального времени состояния всех двигателей и датчиков; одно решение работает кроссплатформенно для разных робототехнических систем, поставляется с сотней примеров программ с обширной документацией, для того чтобы студенты, школьники и любители могли начать учиться программировать; усовершенствованный редактор исходного кода с интеллектуальным отступом; многофункциональный интерфейс со вкладками, позволяющий открывать несколько программ одновременно; бесплатные вебинары, видеоуроки, форумы сообщества, подробные файлы справки и учебная программа, предоставляются Академией робототехники Карнеги-Меллона; полученные навыки легко переходят в использование более профессиональных инструментов, используемых инженерами и программистами, язык программирования имеет тот же синтаксис и семантику, что и профессиональные языки.
Язык программирования может быть интегрирован так же с виртуальной средой роботов. Robot Virtual Worlds — это элитная среда моделирования, которая позволяет учащимся без роботов изучать программирование. Исследования показали, что обучение программированию в RVW более эффективно, чем обучение программированию с использованием физических роботов. RVW моделирует популярные роботы VEX, LEGO и TETRIX в реальном мире в трехмерных средах, позволяет использовать один и тот же язык, RobotC, для программирования виртуальных роботов.
В рамках одного пакета языка существуют три текущих варианта программирования в RobotC: графический естественный язык, текстовый естественный язык и текстовый. Версии языка предназначены для облегчения естественного перехода от графического (Scratch-подобного, упрощенного) к естественному языку и к полному тестовому RobotC.
RobotC — это процедурный язык, в нем нет классов. Программист может использовать «struct» (структуры) в качестве альтернативы групповым переменным. Для работы с переменными и константами представлены типы данных Integers, Longs, Floats, Bytes, Bool, Chars and Strings (в графической версии языка для чисел определен только один тип – float). Определены не только директивы предпроцессора, условные конструкции, обширный набор циклических конструкций, стандартный набор математических и нематематических функций, но и механизм создания собственных функций. Кроме функций основными блоками стали задания (потоки событий), главный поток это “task main()”, при этом возможен запуск параллельных потоков событий (task). Принята общесемантическая для языков Си группировка набора команд фигурными скобками. Описание алгоритма возможно в нескольких модулях, которые можно вызывать один через другого, принято создание файлов библиотек (.h) для удобной организации кода.
Рассмотрим примеры использования языка программирования для решения более сложных задач управления роботом VEX IQ, разработанные для факультатива по программированию робототехнических устройств.
Директивы препроцессора для настройки робота:
Пример 1. Реализовать PID Control при движении робота назад на пять оборотов колеса.
Пропорционально-интегрально-производный контроллер (PID Control) — это механизм обратной связи контура управления, широко используемый в системах управления. Вычисляет значение ошибки как разницу между измеренным значением и желаемым значением. Может использоваться с любым датчиком, который обеспечивает диапазон значений.
Одно действительно полезное использование кодировщиков (энкодеры – измерители числа оборотов колеса) — это выпрямление линий. Эта техника позволяет роботу распрямляться при движении вперед. Идея заключается в том, что одно колесо будет регулировать свою скорость, если градусы энкодера другого колеса не синхронизированы с его градусами. Алгоритм имитирует работу пропорционально-интегрально-производный контроллера.
Приведенный пример показывает, каким образом использовать кодировщики для написания функции, которая позволяет вашему роботу повернуть вспять по прямой линии за пять оборотов. Постоянным мониторингом вращения каждого колеса, программа может корректировать движение робота, пока оба колеса движутся с одинаковой скоростью. Состояние while остановит выполнение программы после 5 оборотов прошло. Происходит движение в обратную сторону, если, например, показания левого энкодера больше, значит колесо отстает и на мотор нужно подать большую мощность. Алгоритмы PID должны иметь «место для маневра» для правильной работы Установка слишком высокой скорости двигателя (> 100 мощностей) может не дать алгоритму достаточно места для регулировок.
Пример 2. Общий механизм выпрямления. Доработайте задания примера 1, для случая движения в разные стороны (вперед или назад). Разработайте отдельную функцию движения. Продемонстрируйте ее вызов из главного потока.
Пример 3. Продемонстрируйте работу параллельных потоков. Один поток должен отвечать за поворот робота, другой за передвижение рук.
Пример 4. Сторожевой таймер. Робот исследует комнату, посредством датчика расстояний.
Присмотревшись к поведению робота повнимательнее, можно заметить, что не все предметы на пути попадают в его поле зрения. Например, если препятствие достаточно низкое, то ультразвуковой датчик его может не заметить, или покрытая тканевой обивкой поверхность вовсе поглощает ультразвуковые сигналы, т. е. не отражает их на чувствительный элемент. Не увидев препятствие (тапок или ножку стула), робот может застрять и будет бесконечно пытаться продолжать движение вперед. Однако, можно прийти к выводу, что в комнате движение не должно быть бесконечным. Скажем, от одной стенки до другой робот может доехать за 15 с. Если за это время он не увидит ни одного препятствия, можно с уверенностью утверждать, что произошло застревание и надо предпринять экстренные меры: отъехать назад и развернуться. Поможет в этом «сторожевой таймер». Такие устройства применяются в микроконтроллерах и защищают их от зависаний.
Сначала вы должны сбросить и запустить таймер с помощью команды ClearTimer (). Вот как настроена команда: ClearTimer (Timer_number). VEX имеет 4 встроенных таймера: T1, T2, T3 и T4. Если вы хотите сбросить и запустить таймер T1, вы должны набрать: ClearTimer (Т1). Затем вы можете получить значение таймера, используя time1 [T1], time10[T1] или time100 [T1] в зависимости от того, хотите ли вы, чтобы выходные данные имели значения 1, 10 или 100 миллисекунд.
Пример 5. «Не собьёшь меня с моего пути». Робот всегда держится от «хозяина» на определённом расстоянии (в 20 сантиметров).
Пример 6. Робот всегда движется в одну и ту же сторону. В случае если его сбивают, он возвращается в исходную ориентацию и продолжает путь.
resetGyro(Gyro); int degree;
repeat(forever)
< degree = getGyroDegrees(Gyro);
setMotorSpeed(leftMotor, 20 + degree); setMotorSpeed(rightMotor, 20 — degree);>
В связи с тем, что значения гироскопа могут дрейфовать (изменяться в покое), рекомендуется произвести его калибровку.
void iqCalibrateGyro() < startGyroCalibration(Gyro, gyroCalibrateSamples1024);
wait1Msec(100); displayTextLine(1, «Calibrating…»);
while (getGyroCalibrationFlag(Gyro)) <>; resetGyro(Gyro); >
Пример 7. Проблемное исследование. Поворот робота вокруг своей оси на 90 градусов. Не используйте гироскоп и эмпирический подбор данных. Результаты вычислений выведите на экран.
Для решения задачи, учащемуся необходимо применить свои математические познания из области геометрии.
Одно из решений может быть сведено к следующему алгоритму:
- Определение пути колеса робота за один оборот. Диаметр колеса 6.37 см. Для вычисления пути необходимо диаметр умножить на число Пи.
- Определение пути, которое необходимо проделать колесу для поворота на 90 градусов. Робот будет делать разворот вокруг своего центра. Это может быть центр расположения своих колес, вращающихся в разные стороны. В этом случае необходимо измерить расстояние между колесами (данные могут разниться в зависимости от конструкции). Так же возможно, левый и правый моторы находится в центре конструкции, посредством зубчатой передачи они управляют каждый своей парой колес, расположенных по бокам. В этом случае нужно определить диаметр окружности по которой будет проходить вращение робота. Возможно измерение расстояния между первым левым и вторым правым колесом. Поэтому данный путь строго определяется в зависимости от конструкции. Предположим, он равен 23 см. Умножив данное число на Пи, мы узнаем путь для полного оборота, на 360 градусов. Поделив на четыре, мы вычислим какой путь необходимо проехать роботу, для того чтобы развернуться на 90 градусов.
- Разделим путь, который необходимо проехать на путь колеса мы вычисли число оборотов колеса. Умножив данное число на 360 мы вычислим данные для разворота в градусах.
float cir = PI * 6.37; float turnover = PI * 23;
float t90 = turnover/4; float target = (t90/cir)*360;
resetMotorEncoder(leftMotor); resetMotorEncoder(rightMotor);
displayTextLine(1, «%d», cir); displayTextLine(2, «%d», turnover);
displayTextLine(3, «%d», t90); displayTextLine(4, «%d», target);
setMotorTarget(leftMotor, target, 50); setMotorTarget(rightMotor, -1*target, 50);
waitUntilMotorStop(leftMotor); waitUntilMotorStop(rightMotor);
Пример 8. Робот-часы. На экране робота отобразите секундную стрелку. В такт секундной стрелке мотор передвигает прикрепленную к ему балку.
float xPosTo,yPosTo, a=0; resetMotorEncoder(leftMotor);
repeat(forever) xPosTo = 23*cos(90-a*6)+63; yPosTo = 23*sin(360-(90+a*6))+24;
drawLine(63, 24, xPosTo, yPosTo); a++;
moveMotorTarget(leftMotor,6,50);wait1Msec(1000);
eraseDisplay(); waitUntilMotorStop(leftMotor);>
В графическом режиме экран отображает 128 на 48 точек. Начало отсчёта левый нижний угол. Секундная стрелка рисуется из центра экрана (63,24) линией для которой задаются координаты начальной и конечной точки. Формулы для расчетов расположения конечной точки представлены в коде.”a” – количество выполнений шагов цикла, умноженное на шесть, поскольку за каждый шаг цикла секундная стрелка должна повернуться на шесть градусов.
Таким образом, RobotC можно считать универсальным предметно-ориентированным языком, на основе которого можно изучать программирование, развивать алгоритмическое мышления учащихся. Язык представлен в трех вариантах, что способствует его изучению уже младшими школьниками. Большое количество стандартных операторов позволяет решать большой перечень прикладных робототехнических задач. Поддержка языком программирования большого числа конструкторов делает его незаменимым среди программных сред для образовательных учреждений.


Сообщить о поступлении
Оставьте e-mail и мы свяжемся с Вами для
оформления заказа в ближайшее время


Оплата 30/70 или полная постоплата (по 44-ФЗ)

Подготовка коммерческих предложений

Разработка технического задания

Широкий выбор способов доставки

Оплата при получении для физических лиц
Характеристики
| Артикул | 2009781 |
| Страна | Дания |
| Размеры (см.) | 23x18x2 см |
| Возраст | 14+ |
| Количество элементов | 1 |
| Производитель | ROBOT C |
| Вес | 0.1 кг |
Описание
Данный комплект заданий был разработан в Carnegie Mellon University's Robotics Academy и включает в себя 40 уроков по темам: «Движение», «Чувствительность», «Показатели», «Программирование», «Системы» и «Развитие проектов».
Для полного выполнения всех заданий будет необходимо программное обеспечение RobotC.
Основные темы курса:
- Работа в команде, развитие личностных качеств
- Решение практических задач
- Работа по настоящему инженерному процессу: анализ задачи, поиск возможных решений, выбор решения, его реализация и тестирование
- Конструирование роботов и управление ими с использованием беспроводного соединения
- Программирование роботов
- Управление роботами с помощью беспроводных джойстиков



























9688 Электронный конструктор LEGO Education Machines and Mechanisms Возобновляемые источники энергии 9688


Программное обеспечение Teaching ROBOTC для LEGO MINDSTORMS 2009781
Данный комплект заданий был разработан в Carnegie Mellon University's Robotics Academy и включает в себя 40 уроков по темам: «Движение», «Чувствительность», «Показатели», «Программирование», «Системы» и «Развитие проектов».
Для полного выполнения всех заданий будет необходимо программное обеспечение RobotC.
Основные темы курса:
- Работа в команде, развитие личностных качеств
- Решение практических задач
- Работа по настоящему инженерному процессу: анализ задачи, поиск возможных решений, выбор решения, его реализация и тестирование
- Конструирование роботов и управление ими с использованием беспроводного соединения
- Программирование роботов
- Управление роботами с помощью беспроводных джойстиков









Подпишись
Контакты
123022 г. Москва , ул. 2-я Звенигородская, д. 13, стр. 15,
Юр. адресс: 111397, г. Москва, Федеративный пр-кт, д. 4, кв. 47 офис XI
Мы работаем: c 09:00 до 18:00




LEGO, логотип LEGO, Minifigure (Минифигурка), DUPLO и MINDSTORMS являются торговыми марками и/или охраняемой авторским правом собственностью LEGO Group.
©2022 The LEGO Group. Все права защищены. Использование этого вебсайта подтверждает ваше согласие с этим.
Читайте также: