
В процессе подготовки к соревнованиям лего роботов ученик составил ряд характеристик двух роботов
Обновлено: 26.07.2024
Подготовка к соревнованиям – это развитие творческих, аналитических, инженерно-технических, коммуникативных способностей учащихся и педагогов. Такая подготовка требует участия многих педагогов, специалистов разного плана. Преподаватели-робототехники развивают механическую и программную часть проекта. Возможны консультации преподавателей-физиков. Преподаватели технического творчества учат работать с инструментами и материалами. Проводить исследования по теме проекта помогает преподаватель проектной деятельности или учитель-предметник. Подготовить плакаты может помочь учитель рисования. Подготовить выступление поможет педагог-организатор. Собрать такую команду учителей для совместной работы над проектом трудно даже для специализированных школ. Учителя заняты ежедневной работой и дополнительная нагрузка не всегда возможна.
Несмотря на сложности, нам удалось cборной командой съездить на «Турнир двух столиц» в Москву, с творческим проектом поучаствовать во Всероссийской Олимпиаде Роботов (WRO) в Иннополисе, а в этом году в феврале принять участие в Чемпионате FIRST в Красноярске. И мы готовы поделиться нашим опытом.
Наша подготовка началась с заинтересованных преподавателей. Я познакомилась с Миллер Линой Львовной. Она тоже участвовала в написании этого материала. Мы работаем в разных школах, преподаем робототехнику в начальных классах, познакомились на городских соревнованиях. Как оказалось, мы ранее задумывались о выезде на «серьезные» соревнования в другие города, но в одиночку на это не решались. И мы решили объединить наших, увлекающихся робототехникой ребят начальной школы в одну сборную команду. Эта практика оказалась эффективной. Когда начинают работать над проектом два преподавателя, появляется больше идей, есть возможность заменить, подстраховать друг друга, обменяться опытом, техникой, легче решить финансовые вопросы.
Подготовку команды на соревнования можно разделить на несколько этапов
Предварительно тренеры обсуждают регламент и положение соревнований, затем подбирают участников команды. Подбор детей для команды - вопрос очень сложный. Ребята должны быть способными, ответственными, готовыми тратить время на разработку проекта, иметь желание добиваться результата, главное – быть увлеченными робототехникой. В связи с особенностями детского возраста важно учитывать и психологическую совместимость. Мы находили заинтересованных ребят в обычных группах, занимающихся по стандартной программе, и предлагали дополнительные занятия для подготовки к соревнованиям. В современном мире у многих детей нет свободного времени. Они занимаются спортом, музыкой, учебой. Некоторые ребята не любят соревнования, выступления и волнения с этим связанные. Зато согласившиеся учащиеся делают осознанный свой выбор и видят цель наших занятий, цель своей подготовки, стремятся участвовать и победить на соревнованиях.
В зависимости от оборудования для подготовки мы выбрали место занятий и назначили время, освободив небольшое окошко в своих плотных графиках.
Работа над проектом
На первой встрече с ребятами знакомимся с положением о соревнованиях, совместно ставим цель и составляем план работы для достижения цели. Детям предлагаем продумать и нарисовать эскизы будущих проектов. Закладываем основу исследовательской работы. Предлагаем искать информацию по выбранной проблеме, расспросить родителей, друзей, использовать источники информации в интернете. Ребята охотно обсуждают и делятся найденной информацией. На этом этапе очень важно найти существующие в мире решения, обсудить их достоинства и недостатки. Получить консультации специалистов.
Например, в прошлом году темой Всемирной Олимпиады Роботов были «Умные города». В младшей категории «Умный школьный автобус». Мы предложили умный автобус, как часть «Умной школы». Идею общей школьной системы, помогающей каждому ребенку, начиная с момента входа в автобус. Система узнавала детей при входе в автобус, помогала осваиваться в новой обстановке, могла играть с детьми, повторять уроки, провести экскурсию в космос или микромиры, старалась быть другом каждому ребенку.
На соревнованиях FIRST LEGO LEAGUE предлагали найти проблему строительства в вашей местности. Мы выбрали проблему озеленения. И предложили достроить на наших школах еще один этаж с зимним садом и пространством развития. Современные библиотеки, исследовательские лаборатории, пекарни – все, чего так не хватает детям в школе. И, конечно, роботы-помощники.
На этапе обсуждения идей происходит начальное распределение ролей в команде. Выделяются исследователи, конструкторы и программисты. Очень нужны ребята, которые помогают всем. Несмотря на распределение ролей в команде все могут рассказать про исследования, могут комментировать и исправлять программы, починить механизм и объяснить сильные и слабые стороны конструкций.
На второй встрече устраивается «мозговой штурм», во время которого ребята предлагают самые разные идеи реализации проекта и в результате совместного обсуждения происходит выбор моделей, определяется, какие конструкции нужно создать, и распределяется работа между членами команды.
На следующих занятиях происходит сборка моделей и написание программ для управления. На каждом занятии ведутся записи в Инженерную книгу – дневник работы над проектом. Ребята также выезжают вместе на экскурсии для сбора дополнительной информации по теме соревнований. На каждом занятии проводятся совместные чаепития с командой, иногда ребята вместе гуляют для укрепления командного духа.
Периодически проводится подведение промежуточных итогов, внесение изменений в собранные конструкции и в программы управления, оценка всего проекта в целом.
Подготовка к защите проекта
После того, как проект собран, начинается подготовка к выступлению ребят. С помощью тренеров составляется план выступления, затем идет репетиция. Чтобы лучше подготовить выступление, родителям предлагается дома расспросить детей об их проекте. Помощь родителей очень важна, они сопровождают ребят на экскурсии, воодушевляют их на творчество, помогают решать организационные вопросы.
Во время командных репетиций создаются видеоролики, которые помогают вносить корректировки в выступление. К этим съемкам дети готовятся серьезно, привыкают находиться перед камерами, ведь высока вероятность того, что на соревнованиях их будут снимать.
Необходимо помнить о еще одной важной составляющей творческого проекта – это плакат, на котором представлена команда, описание проекта и программ управления, фотографии командной работы. Ребята придумывают стиль оформления, готовят материалы, размещают на «постере» свои рисунки и фотографии.
В результате этих мероприятий учащиеся получают опыт подготовки к соревнованиям, узнают много нового по конструированию и программированию, знакомятся с дополнительной информацией по теме проекта, расширяют свой кругозор, получают навыки командной работы, приобретают новых друзей. У педагогов тоже есть результаты: опыт подготовки к соревнованиям повышает квалификацию, дипломы и сертификаты повышают статус.
Во время подготовки нам очень не хватало участия преподавателей другого профиля, но теперь нам легче будет подключить их к дальнейшей работе. Мы лучше понимаем необходимость распределения ролей преподавателей для подготовки команды. Можем обращаться за консультацией или просить помочь с конкретной проблемой. Для этого мы призываем организаторов соревнований расширить допустимое количество участников и тренеров команд.
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
Выберите документ из архива для просмотра:
Выбранный для просмотра документ Выступление по робототехнике.ppt


Курс повышения квалификации
Интернет-технологии и социальные сети как средство учебной коммуникации

Курс повышения квалификации
Специфика преподавания дисциплины «Информационные технологии» в условиях реализации ФГОС СПО по ТОП-50
Курс повышения квалификации
Дистанционное обучение как современный формат преподавания

«Домашнее обучение. Лайфхаки для родителей»
Рабочие листы и материалы для учителей и воспитателей
Более 2 500 дидактических материалов для школьного и домашнего обучения
Описание презентации по отдельным слайдам:
Подготовка обучающихся к соревнованиям по образовательной робототехнике
Кривенцов Леонид Александрович,
учитель информатики и ИКТ, робототехники
МАОУ - СОШ № 4 г. Асино Томской области
Муниципальное автономное общеобразовательное учреждение – средняя общеобразовательная школа №4 города Асино Томской области
Томск - 2016

МЕТОДИКА ОБУЧЕНИЯ:
(УРОЧНАЯ И ВНЕУРОЧНАЯ ДЕЯТЕЛЬНОСТЬ)
В МАОУ-СОШ №4 г. Асино ведется спецкурс «Робототехника», в рамках которого обучающиеся 5-11 классов физико-математической параллели получают следующие знания:
1. Элементная база и базовые конструкции.
2. Основные конструкции языков программирования.
3. Решение классических задач: движение по линии, обнаружение препятствий и их объезд, выход из лабиринта и др.

Все школьные наборы на основе LEGO предназначены для того, чтобы ученики в основном работали группами. Поэтому учащиеся одновременно приобретают навыки сотрудничества и умение справляться с индивидуальными заданиями, составляющими часть общей задачи. В процессе конструирования добиваться того, чтобы созданные модели работали и отвечали тем задачам, которые перед ними ставятся. Учащиеся получают возможность учиться на собственном опыте, проявлять творческий подход при решении поставленной задачи. Задания разной трудности учащиеся осваивают поэтапно. Основной принцип обучения «шаг за шагом», являющийся ключевым для LEGO, обеспечивает учащемуся возможность работать в собственном темпе.
МЕТОДИКА ОБУЧЕНИЯ:
(УРОЧНАЯ И ВНЕУРОЧНАЯ ДЕЯТЕЛЬНОСТЬ)

Важно, чтобы в ходе занятий ребята не только занимались робототехникой, но и использовали ее, как интерактивный элемент, с помощью которого некие теоретические знания закрепляются на практике.
Как правило теоретические знания могут быть, например, по точным наукам: математике и физике.
МЕТОДИКА ОБУЧЕНИЯ:
(УРОЧНАЯ И ВНЕУРОЧНАЯ ДЕЯТЕЛЬНОСТЬ)
Место для фото

Модели из образовательных конструкторов дают представление о работе механических конструкций, о силе, движении и скорости, помогают производить математические вычисления. Данные наборы также помогают изучить разделы информатики: моделирование и программирование.
МЕТОДИКА ОБУЧЕНИЯ:
(УРОЧНАЯ И ВНЕУРОЧНАЯ ДЕЯТЕЛЬНОСТЬ)


ПОДГОТОВКА К СОРЕВНОВАНИЯМ:
(ЭТАП ТРЕНИРОВОК)
Следование по траектории с различными усложнениями (инверсия, изгибы, разрывы).
Ориентирование на траектории (перекрестки, тупики).
Ориентирование на поле (зона вратаря, зона соперника).
Преодоление препятствий (горки, кочки, барьеры, объезд банки).
Транспортировка предметов (перетаскивание, подъем).
Удаление предметов (отбивка мяча, кегли, сброс банки).
Цель: закрепить навыки решения распространенных заданий, встречаемых на соревнованиях в различных номинациях:
Место для фото

ПОДГОТОВКА К СОРЕВНОВАНИЯМ:
(ЭТАП ПОДГОТОВКИ КОМАНДЫ)
Место для фото

На подготовительном этапе:
Найти все возможные способы соединения деталей.
Придумать новые способы крепления деталей.
Собрать свою модель по памяти.
Найти отличия между моделями на 1-й и 2-й сборке и т.д.
На этапе воспроизведения конструкции модели:
Определить, что поменялось.
Найти лишнюю деталь (добавить деталь в конструкцию).
Собрать без детали (убрать деталь из конструкции).
На завершающем этапе:
Выполнение дополнительных заданий.
Определение границ возможностей (например, максимальная высота бортиков, ворот и т.д.)
ПОДГОТОВКА К СОРЕВНОВАНИЯМ:
(УПРАЖНЕНИЯ ПО КОНСТРУИРОВАНИЮ)

На подготовительном этапе:
Определить разницу между двумя программами.
На этапе тестирования программы:
Найти ошибку в программе.
Определить, что поменялось в поведении робота.
На завершающем этапе:
Выполнение дополнительных заданий.
Определение границ возможностей, «гибкости» программы (например, варианты возвращения вратаря на ворота).
ПОДГОТОВКА К СОРЕВНОВАНИЯМ:
(УПРАЖНЕНИЯ ПО ПРОГРАММИРОВАНИЮ)

НАШИ ЗАКОНЫ В ПОДГОТОВКЕ К СОРЕВНОВАНИЯМ:
Сама команда или ее капитан принимают все важные решения при разработке и реализации проектов.
Тренер не навязывает свое решение и не игнорирует даже самые отчаянные идеи.
Участники должны думать самостоятельно.
Взаимное доверие – прежде всего.
Каждая идея – бесценна.
Экспериментируй и выбирай вариант решения.
Сама команда или ее капитан разрабатывает и строит модели роботов.
Не усложняй конструкцию или программу.
Изучи и строго соблюдай регламент.

Отвечать на вопросы обучающимся другим тщательно продуманным вопросом, ответ на который позволит им применить свои научные знания и сделать логические выводы самим:
Что получится, если…
А затем…
Как это будет работать?
ТРЕНИНГ ВО ВРЕМЯ ПОДГОТОВКИ:
(ВОПРОСОМ НА ВОПРОС)

ТРЕНИНГ ПОСЛЕ СОРЕВНОВАНИЙ:
(ЛУДШИЕ/ХУДШИЕ ВПЕЧАТЛЕНИЯ)
В конце тренировки, соревнований или игрового дня участники команды и болельщики садятся в круг и делятся лучшими и худшими впечатлениями (анализ полученного опыта; что получилось, что нет; почему? Что нужно изменить в конструкции или алгоритме? и т.д.).

2 место «Футбол роботов», 3 место «Сумо», соревнования по робототехнике «Кубок губернатора», 2015г.
1 место «Теннис», соревнования РобоСеверск, 2015г.
2 место «Футбол роботов», региональная робототехническая олимпиада школьников, 2016г..
3 место «Футбол роботов», Всероссийский этап международных соревнований RoboCap, 2016г..
Участие во Всероссийской олимпиаде по робототехнике в г. Казань, 2016г.
ДОСТИЖЕНИЯ ОБУЧАЮЩИХСЯ:
(КОМАНДЫ МАОУ-СОШ №4 г. АСИНО)
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
1. ФГОС включают в себя требования к:
- все вышеперечисленное
2. Какие уровни общего образования устанавливаются в РФ?
- дошкольное образование
- начальное общее образование
- основное общее образование
- среднее общее образование
3. Кто несет ответственность за создание условий воспитания и обучения у ребенка с ограниченными возможностями здоровья, рекомендованными и отражёнными в заключении психолого-медико-педагогической комиссии?
- родители(законные представители)
- муниципальный центр психолого-педагогической, мед и соц помощи
+ органы исполнительной власти субъектов РФ, осуществляющие гос управление в сфере образования, и органы местного самоуправления, осуществляющими управление в сфере образования
4. Выполнение рекомендаций психолого-медико-педагогических комиссий о специальных условиях для получения образования детьми с ОВЗ и инвалидностью является обязательным для исполнения:
- образовательными организациями
5. На педагогическом совете шло обсуждение проблемы: Кто несет ответственность за качество образования выпускников? Чье мнение является верным на основе Закона об образовании?
- мнение 1 – образовательное учреждение
6. Традиционная схема мониторинга включает в себя:
- вводный, текущий, итоговый контроль
7. В каком из указанных случаев работодатель имеет право при необходимости эпизодически привлекать работника к работе за пределами установленной для работника продолжительности рабочего времени?
- работник работает на условиях ненормированного рабочего дня
8. Продолжительность рабочего времени педагогических работников установлена в количестве:
- не более 36 часов в неделю
9. Особенность режима рабочего времени учителя заключается …
- в установлении отпуска длительной продолжительности
- в наличии установленных норм времени только для выполнения педагогической работы, связанной с учебной работой, которая выражается в фактическом объеме учебной нагрузки
- нет особенностей
10. Какой из этих видов деятельности скорее всего приведет к повышению профессионального мастерства учителей и образовательных результатов учащихся согласно результатам TALIS ?
- совместное преподавание/обсуждение посещенных уроков учителями школы
11. Развитие школы – это …
- процесс качественных изменений в составляющих ее компонентах и ее структуре, вследствие которых школа приобретает способность достигать более высоких, чем прежде, результатов образования
12. Выберите ВСЕ верные ответы. Какие документы из нижеперечисленных могут быть отнесены к образовательным проектам:
- + Федеральная целевая программа «Развитие образования» до 2030 г
- +Федеральная целевая программа «Доступная среда» на 2011-2025 гг
- +Программа развития школы
13. Анализ проблем всегда начинается:
- с результатов работы образовательной системы школы
14. Результат анализа сильных и слабых сторон организации, а также определения возможностей и препятствий ее развития, это:
- SWOT – анализ
15. Сколько основных разделов включает в себя Рабочая программа воспитания?
- четыре раздела
16. Зависит ли миссия образовательной организации от актуальных и потенциальных стейкхолдеров:
- существенно зависит
- практически не зависит
17. Может ли работник образовательной организации Московской области рассчитывать на защиту Профсоюзом своих индивидуальных социально-трудовых прав, если он не является членом Профсоюза?
- может, при условии ежемесячного перечисления на счет профсоюза 1% от своей заработной платы
- может, независимо от своего членства в Профсоюзе
18. Имеют ли педагогические работники право на участие в управлении образовательной организацией?
- имеют через своих представителей
19. Какая из перечисленных ниже характеристик определяет целенаправленно-мотивационный компонент в формировании имиджа образовательных учреждений?
- все ответы верны
20. На кого возлагается персональная ответственность за содержание, полноту, достоверность и своевременность размещения информации и документов, подлежащих обязательной публикации на официальном сайте образовательной организации в сети «Интернет»?
- на руководителя образовательной организации
21. В коллективе возникла конфликтная ситуация, требующая принятия решения руководителя. Какой стиль решения конфликтной ситуации предпочтителен, если: необходимо найти общее решение, причем каждый из подходов важен и не допускает компромиссных решений; у руководителя сложились длительные, взаимозависимые отношения с коллективом; стороны способны выслушивать друг друга и излагать суть своих интересов, умеют интегрировать точки зрения; необходимо объединить разные точки зрения и усилить вовлеченность сотрудников в деятельность.
- сотрудничество (кооперация, интеграция)
22. Выберите нововведение, которые необходимо реализовать в вашей образовательной организации, отвечающие следующему запросу современного общества: создание равных условий для обучения всех детей независимо от их возможностей.
- реализация инклюзивного подхода в образовательном процессе
23. Какой элемент находится в ячейке 5.

- отсутствие исследовательской и экспериментальной деятельности
24. Выберите группу слов, подходящую по смыслу к данному тексту.
Целью стратегии является определение ____ государственной политики в области ____ и социализации детей, основных направлений и механизмов _____ институтов воспитания, формирования общественно-государственной _____ воспитания детей в РФ, учитывающих интересы детей, актуальные ___ современного российского общества и государства, глобальные вызовы и условия развития страны в мировом сообществе.
- приоритетов, воспитания, развития, системы, потребности
25. Выберите один верный ответ

- сделай или умри!
26. Выберите ВСЕ верные ответы. Выберите все действия руководителя, соответствующие модели руководства, ориентированного в большей степени на работу/задачу, чем на отношения/человека.
- ! распределяет роли для реализации поставленной задачи
- ! допускает участие подчиненных в принятии решений
- ! планирует и составляет график работ
- действует жестко и строго контролирует
- общается в одобрительной манере
- ! передает ответственность за процесс деятельности сотруднику
27. Для планирования деятельности вы предлагаете своим сотрудникам использовать метод Эйзенхауэра. Суть этого метода заключается в том, что на основе таких критериев, как срочность и важность, задачи делят на 4 группы.
Соотнесите рекомендации по составлению плана для каждой группы дел матрицы Эйзенхауэра.
1) Срочные и важные дела
А) плана нет, но нужно иметь типовые инструкции по реализации задач
2) Не срочные, но важные
Б) времени на разработку плана нет – нужно немедленно решать поставленные задачи, и план существует как последовательность целей
3) Срочные, но не важные
В) эти дела выполняются автоматически, лучше, если управленец будет делегировать их подчиненным
4) Неважные и несрочные
Г) план должен быть детальным, с определением сроков, назначением сотрудников, ответственных за каждый этап
ВНИМАНИЕ! В поле ответа вставьте строчную букву без скобки.
Ответ: 1- б, 2- г, 3- в, 4 – а
28. Соотнесите прописанные выше шаги с их описанием.
Любой вид деятельности предполагает ряд последовательных шагов: 2) планирование, 3) мотивация (самомотивация), 4) реализация намеченного и 5) контроль (самоконтроль) результатов
1) Постановка задач
А) разработка планов и альтернативных вариантов своей деятельности
Б) составление распорядка дня и организация личного трудового процесса с целью реализации поставленных задач
3) Мотивация (самомотивация)
В) фиксирование результатов, сравнение полученных результатов с поставленной целью, удовлетворение от полученного результата
4) Реализация намеченного
Г) совокупность внутренних и внешних движущих сил, побуждающих человека к деятельности, направленной на достижение определенных целей
5) Контроль (самоконтроль) рез-тов
Д) анализ и формирование личных (или рабочих) целей
ВНИМАНИЕ! В поле ответа вставьте строчную букву без скобки.
Ответ: 1-д, 2-а, 3-г, 4-б, 5-в
29. Выберите темы курсов повышения квалификации педагогов, учитывающие следующие характеристики учащихся.
«Дети-альфа переживут новую техническую революцию, которая коснется быта, отдыха, образования. Новое поколение рано начнет зарабатывать, сможет обеспечивать себя даже в подростковом возрасте. Цифровая грамотность достигнет наивысшего пика развития.
Поколения альфа выбирают новую профессию раз в 3-4 года. Дети альфа молниеносно сканируют текстовый и графический контент, поглощают рекордно большое количество данных в сутки. Стирают границы между жизнью и виртуальной вселенной.
Отсутствие агрессивности, доброжелательность и принятие окружающих.»
- организация коррекционно-развивающей работы с неуспевающими и одаренными учащимися
- ! организация профориентационной работы в школе
- специфика преподавания русского языка как иностранного
- ! тьюторская работа в системе непрерывного образования
- ! создание и сопровождение образовательного контента в системе смешанного обучения
- ! организация деятельности классного руководителя в условиях введения новых ФГОС
- развитие математической компетенции у учащихся начальной школы
30. Согласно концепции стратегического менеджмента, на что стоит указывать сотруднику при постановке задачи?
- на область приложения усилий
- на желаемый результат его работы
31. Выберите ВСЕ верные ответы.
Школа должна составлять расписание, чтобы отразить в нем ражим учебной деятельности. Чтобы составить расписание, надо учесть общие требования СанПиН для начальной, основной и средней школы.
- ! нельзя проводить нулевые уроки
- обучение, при необходимости, можно организовать в две или три смены
- !! образовательную нагрузку следует равномерно распределить в течение учебной деятельности
- ! перерыв между сменами должен быть не менее 50 минут
- ! наибольший объем учебной нагрузки надо предусмотреть на вторник и среду
- ! наименьший объем учебной нагрузки надо предусмотреть на понедельник и четверг
- ! максимальное количество уроков в день для 5-7 классов – 7
32. Установите соответствие между требованиями о защите персональных данных (Список А) и ситуациями, в которых данное требование реализуется (Список Б). Каждому пункту из списка А могут соответствовать один или несколько пунктов из списка Б.
1) Ситуация предполагает обязательное наличие согласия родителей (законных представителей) на размещение личной информации (включая фотографии) об их детях.
2) Ситуация не предполагает обязательного наличия согласия родителей (законных представителей) на размещение личной информации (включая фотографии) об их детях.
А) Заместитель директора по воспитанию и социализации учащихся опубликовал в рубрике «Доска почета» на сайте образовательной организации фотографии лучших учеников школы.
Б) Социальный педагог школы разместил на сайте образовательной организации протокол заседания Совета по профилактике безнадзорности и правонарушений несовершеннолетних с указанием информации об обучающихся, поставленных на внутренний учет в школе.
В) Журналист ВГТРК «Россия-1» был приглашен на концерт в лучшую школу города, и по итогам его работы на канале был показан ролик с выступлениями учеников этого образовательного учреждения.
Г) После разговора с директором школы журналист местной газеты «Красные зори» разместил фотографии учащихся-победителей муниципального тура Всероссийской олимпиады школьников, их имена и фамилии, с указанием классов обучения.
ВНИМАНИЕ! В поле ввода вставьте строчные буквы без скобки(пример: аб)
Одним из часто встречающихся видов соревнований является соревнование “Движение робота вдоль черной линии”. В последнее время активно развивается робототехника, открывается множество кружков. Как следствие проводится множество соревнований и конкурсов по робототехнике различного уровня. Это направление называется соревновательная робототехника.

Это соревнование проводится в разных номинациях и категориях. Есть движение по широкой линии (5 см), по узкой линии (1,5 см), включают в движение по линии участки с прерывистой линией. Часто еще используется объезд роботом препятствий (например объезд кирпича) или преодоление препятствий (например, качающийся мост). После преодоления препятствий робот должен вернуться на линию и успешно финишировать.
Так как сейчас есть много типов робототехнических конструкторов, то соревнования также разделяют по категориям. Т.е. движение по линии Lego EV3, отдельно движение по линии Arduino и т.д. Побеждает робот, преодолевший дистанцию за минимальное время не потеряв трассу.
Алгоритмы движения робота
Есть несколько основных алгоритмов движения робота вдоль черной линии с использованием различных типов регуляторов:
- Релейный регулятор
- Пропорциональный регулятор
- Пропорциональный дифференциальный регулятор
- Кубический регулятор
- Пропорциональный интегральный регулятор
- Пропорциональный интегральный дифференциальный регулятор
Можно использовать эти алгоритмы с применением одного, двух, трех и даже четырех датчиков цвета. Количество применяемых датчиков зависит от сложности соревнований и каждый раз подбирается индивидуально..
Зрение робота EV3
Робот EV3 не обладает зрением и может воспринимать информацию о линии при помощи датчика цвета EV3.

Робот и человек по разному видят черную линию. У человека границы черного и белого четко различимы. Робот же видит размытую картину границы черного и белого. Для того, чтобы более точно определить линию, датчик робота должен быть расположен на границе черной линии и белого поля посередине.

При этом высота расположения датчика над линией должна быть около 1 см. Но это рекомендуемая высота. На соревнованиях встречаются различные варианты расположения датчика и подбираются они участниками индивидуально.
Калибровка датчика цвета
Для того, чтобы применить указанные алгоритмы нужно откалибровать датчик цвета на реальном поле. Есть два способа калибровки:
- ручной способ — все вычисления проводятся самостоятельно
- автоматическая калибровка — вычисления производятся при помощи блоков операций с данными
Датчик работает в режиме отраженного света. Суть метода состоит в том, что мы находим пороговое значение белого и черного цвета.
На практике нужно измерить значение белого цвета, затем черного цвета, суммировать их и разделить на два. Т.е. если обозначить пороговое значение буквой C, значение белого цвета буквой A и значение черного цвета буквой B, то формула будет выглядеть следующим образом:
С = ( A + B ) / 2
Измерить значение белого и черного цвета можно просто поочередно расположив датчик над белой и черной линией и записать значения.
Ручной режим калибровки датчика цвета EV3
В ручном режиме делается это просто, при помощи меню, расположенном на экране блока Lego EV3. Для этого нужно на экране блока EV3 зайти в третью вкладку и открыть первое приложение из пяти. Это приложение называется представление порта.
Здесь можно быстро посмотреть к какому порту присоединены датчики или сервомоторы. При помощи кнопок управления микроконтроллером EV3 нужно перейти к любому из занятых портов, и тогда можно посмотреть текущие показания, которые в данный момент получены с сенсоров или сервомоторов.
Для примера установлю датчик цвета в порт под номером 3 и сниму показания на белом поле.

На экране блока EV3 отобразилось показание в 43 условных единицы. Таким же образом определяем показания датчика на черной линии. Например показания будут 3 условных единицы. Подставляем эти значения в формулу.
С = ( A + B ) / 2 = (43 + 3) / 2 = 46 / 2 = 23
В результате получаем пороговое значение 23 условных единицы.
Автоматическая калибровка датчика цвета
Таким же точно образом измеряем пороговое значение (его еще называют значение серого) при автоматической калибровке, но на этот раз значение записывается в переменную. Назовем переменную, например, porog. В среде программирования Lego EV3 пишем программу для калибровки.

В первой части программы нужно расположить датчик над белым фоном. Датчик касания расположен в 1 порту. В программе используется блок ожидания действия с датчиком касания. В данном случае установлен параметр “щелчок” — цифра 2 в нижней части блока ожидания. Т.е. нужно нажать и отпустить кнопку датчика.
После этого датчик цвета в режиме отраженного света измеряет значение белого цвета и значение записывается в переменную A.
Во второй части программы нужно расположить датчик над черной линией и также нажать на кнопку датчика касания. Значения черного цвета записываются в переменную B.
В третьей части программы мы считываем значения датчиков из переменной A и B и передаем их значения в блок математики, который находится в режиме “Дополнения”. В этом блоке происходит вычисление по формуле С = ( A + B ) / 2 ирезультат вычисления записывается в переменную С.
Теперь значение переменной С можно использовать в качестве порогового значения серого для дальнейшего использования в алгоритмах движения по линии.
Движение по тонкой линии Arduino
Фрагмент соревнований по робототехнике «Движение по тонкой линии». Также это соревнование называют «Тонкий Триал». Этот очень быстрый робот в номинации роботов Arduino является победителем региональных соревнований.
По условиям соревнований робот Arduino должен совершить объезд кирпича и преодолеть качающийся мост. После преодоления препятствий робот должен вернуться на линию и финишировать не сойдя с трассы. Тонкий триал есть и в категории Lego EV3 роботов.
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм. Пусть n – количество оборотов, k – заданное расстояние. Тогда количество оборотов n = k / L =>
n = 1000 мм / 175,84 мм = 5,69 оборотов.
Программа для Lego EV3 для движения робота на заданное количество оборотов.
- Во вкладке «Движение» выбираю блок «Рулевое управление».
Устанавливаю режим «Включить на количество оборотов», «Рулевое управление» установлено в 0 – это означает движение по прямой линии. Большие моторы установлены в порты B и C.
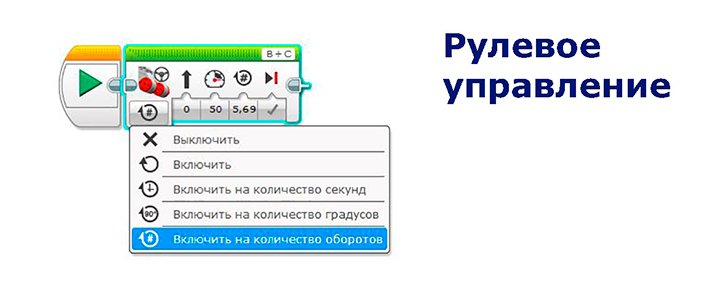
рулевое управление движение по прямой на один метр
Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
Все настройки блока такие же, как и настройки у блока «Рулевое управление». Для того чтобы робот ехал по прямой необходимо скорость моторов установить одинаковой.
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.

робот тележка лего
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
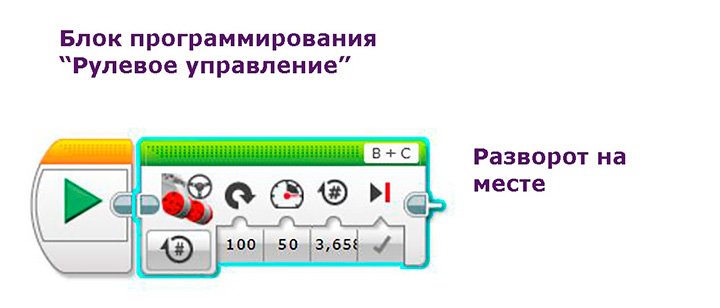
Разворот на месте
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равна
L = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
Для блока программирования «Рулевое управление» можно задать разворот на 100 условных единиц (или — 100), что означает разворот на месте. Скорость 50 у.е. и 3,568 оборота.
разворот робота на месте рулевое управление
Для блока программирования «Независимое управление моторами» просто скорость одного мотора ставим 50 у.е., а другого – 50 у.е. При этом количество оборотов колес остается 3,568.
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
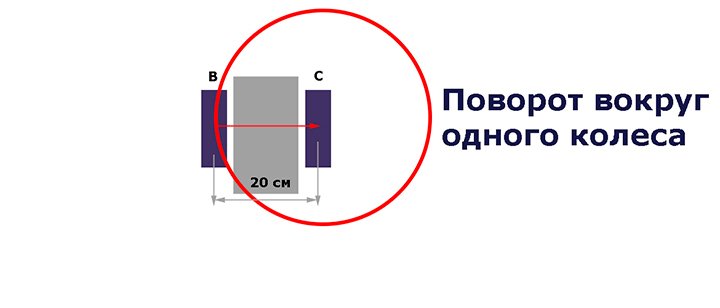
Поворот робота вокруг одного колеса
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Для робота собранного на базе набора Lego EV3 целесообразно применить программирование с помощью блока «Независимое управление моторами». Где одному мотору задать нулевое значение оборотов, а другому вычисленное. При повороте на 360 градусов это будет 7,136 оборота.
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
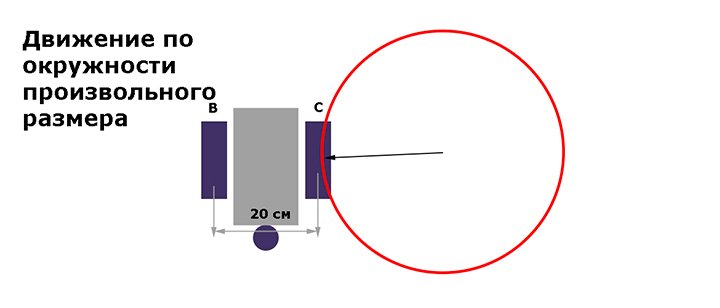
Движение робота по окружности произвольного размера
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 + R2)
Скорость правого колеса V1, а скорость правого колеса V2.
Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 + R2)) / V2
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 + R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2 / V1 = (R1 + R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 + R2) / R1 ó 100 / V1 = (20 + 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
Имея вычисленные значения скоростей можно составить программу прохождения участка. Для робота Lego EV3 можно использовать блок программирования «Независимое управление моторами». Скорость левого двигателя устанавливаем 100 у.е., скорость правого двигателя устанавливаем 50 у.е.
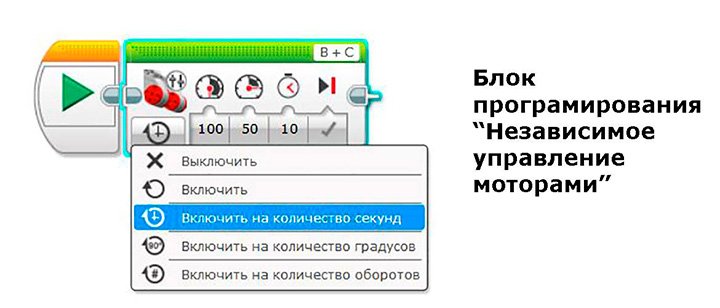
Независимое управление моторами Lego EV3 произвольная окружность
Режим устанавливаем «Включить на количество секунд». Произвольно установим 10 секунд. Для того, чтобы точно проходить заданное расстояние нужно замерить время прохождения одного круга секундомером. Зная это время можно задавать нужное нам расстояние.
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.
Читайте также: